Due to machanical limitation or software limitation, there are cases that inverse kinematics cannot be properly solved in the motion space, which means the angles of each joint cannot be calculate from the Cartesian coordination. The positions that inverse kinematics cannot be calculated are called singularity points.
Result of Singularity
Robot is not free to perfrom certain motions.
The limit of angular velocity is approaching infinity, which cause the robot to lose control and even to damage surrounding personnel, device or even the robot itself.
Cannot solve inverse kinematics.
Singularity point of EC series robot
Wrist Singularity:Robot Joint 4 and Joint 6 are parallel.
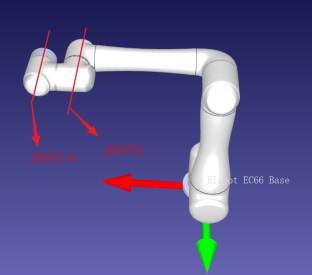
Elbow Singularity:Joint 2, Joint 3 and Joint 4 are in the same plane.

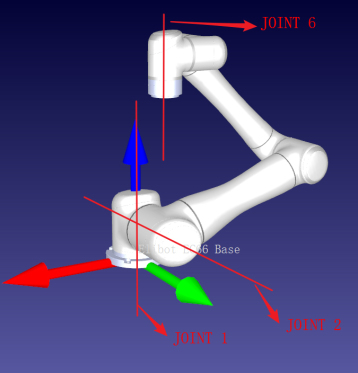
Shoulder Singularity:Joint 1, Joint 2 and Joint 6 are in the same plane.