EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
所有分类
通用发布
所有标签
CS
RoboDK
仿真
modbus
Ethernet/IP
通讯
OPCUA
29999
推荐
最新
最热
1.
置顶
加精
CS机器人合集
1 常见使用问题 0. 教学视频:https://bbs.elibot.cn/forum/detail/topic/307.html 1. 下载和使用CS虚拟机: 最新版本:https://www.elibot.com/service/technical?kw=&type1=&type2=&type3=&type4=&type5=144&wd=1&tp=1 老版本(v2.2):https://…
分享
手机扫码分享
复制链接
0
10105
2.
置顶
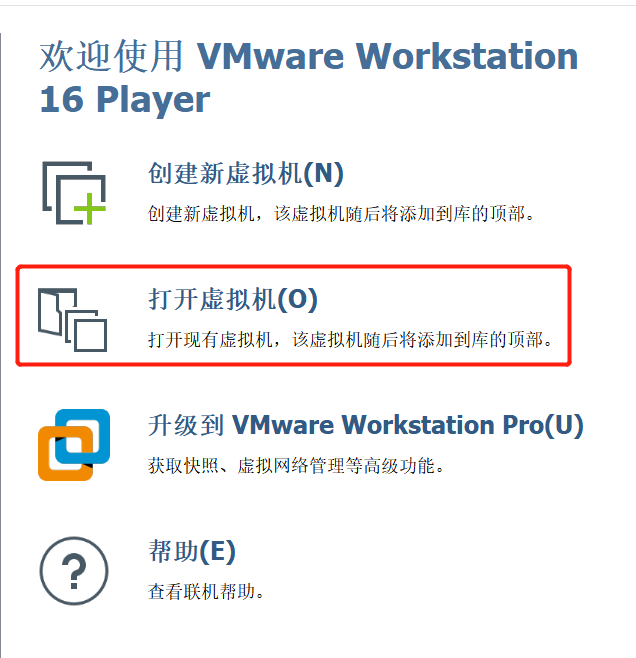
如何安装并使用CS虚拟机
下载软件1.下载VMWare虚拟机软件并安装。链接:点击此处下载2. 下载所需版本的cs虚拟机文件并解压,存在电脑任意位置。链接:点击此处下载使用虚拟机1.打开下载好的VMWare软件,点击“打开虚拟机”。2.找到刚才解压后的文件夹,选择对应的虚拟文件并打开。3. 此时左侧会出现虚拟机图标,左侧选中该虚拟机,在右下角点击“播放虚拟机”。如遇密码:elibot。进入页面后,可选择所需的型号(CS Robot Simulator v2.6.0)双击打开并进行仿真。导出程序可在Home-elisim-elibo
分享
手机扫码分享
复制链接
1
5326
3.
置顶
机器人远程模式外部发送脚本控制机器人
机器人使用30001端口,与外部进行10Hz的交互。即机器人通过30001端口,每100ms返回固定的机器人状态(位置,tcp等)外部设备可以往30001直接发送机器人脚本,机器人处于远程模式,机器人就会运动。(点击下图右上角的Elite logo…
分享
手机扫码分享
复制链接
0
4073
4.
加精
CS打包程序
一、新版软件打包方式 在机器人正常模式下,在进行打包之前请先将末端和本体上线缆全部拆除,打开配置→通用→打包位→移至默认打包位二、旧版软件打包方式 不同机器人有不同的打包姿态,可以 连续单击下图所示位置5次,并输入密码 elite或elibot,进入专家模式,并使用 移动至打包位按钮
分享
手机扫码分享
复制链接
0
1620
5.
机械臂拖动
刚开机时拖动不灵敏,热机5分钟后,拖动渐入佳境,这种现象的原因是什么?
分享
手机扫码分享
复制链接
0
60
6.
使用模拟量改变速度倍率
如果想通过模拟量输入来改变机器人的速度倍率,可以使用如下程序:global type = "current" def t1(): while (True): av = get_standard_analog_in(0) if (type == "current"): percent = (av - 0.004) / 0.016 elif (type == "voltage"): …
分享
手机扫码分享
复制链接
0
1228
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件