EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
所有分类
通用发布
所有标签
CS
RoboDK
仿真
modbus
Ethernet/IP
通讯
OPCUA
29999
推荐
最新
最热
1.
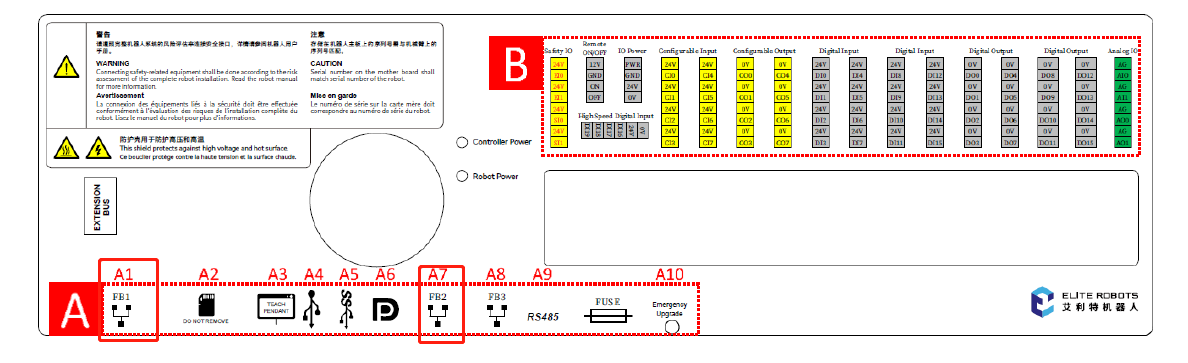
CS机器人控制器网口功能介绍
CS机器人控制柜有3个网口,分别为FB1,FB2,和FB3。 FB3留待后期增加功能,目前不使用。FB1: pc可以连接该网口,使用包括 VNC, FTP访问机器人program文件夹{ "name": "My Server", "host": "192.168.1.200", "protocol": "sftp", …
分享
手机扫码分享
复制链接
2
1938
2.
置顶
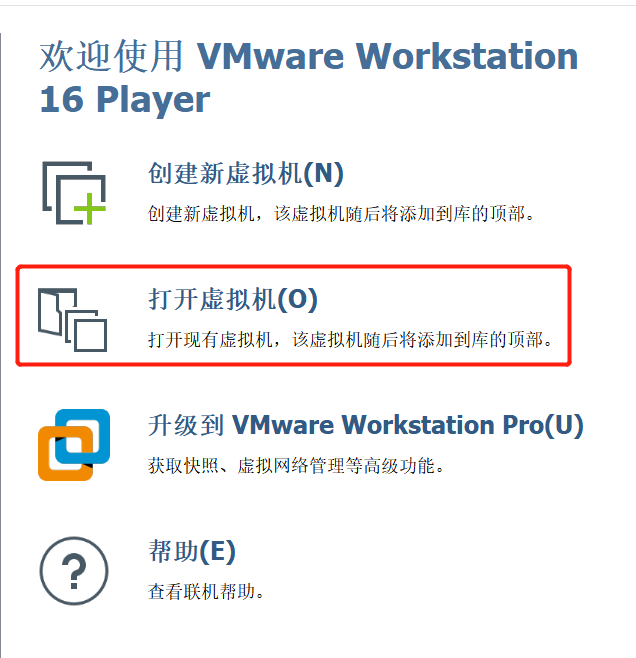
如何安装并使用CS虚拟机
下载软件1.下载VMWare虚拟机软件并安装。链接:点击此处下载2. 下载所需版本的cs虚拟机文件并解压,存在电脑任意位置。链接:点击此处下载使用虚拟机1.打开下载好的VMWare软件,点击“打开虚拟机”。2.找到刚才解压后的文件夹,选择对应的虚拟文件并打开。3. 此时左侧会出现虚拟机图标,左侧选中该虚拟机,在右下角点击“播放虚拟机”。如遇密码:elibot。进入页面后,可选择所需的型号(CS Robot Simulator v2.6.0)双击打开并进行仿真。导出程序可在Home-elisim-elibo
分享
手机扫码分享
复制链接
1
4394
3.
CS机器人外部启动
1. 配置启动程序与信号1.1 配置启动程序与信号 1.机器人开机完成后,选择左侧配置--找到启动选项--选择开机自动加载的任务---选择启动任务的信号--选择自动释放抱闸的信号。切换控制方式2.1切换控制方式为远程。3. 启动…
分享
手机扫码分享
复制链接
1
1302
4.
CS示教4点码垛实现
CS机器人自带码垛包,采用如上示教4个角点,设置每行/列个数自动完成码垛。对于以上的代码简化实现,可以直接下载以下链接的代码,并根据实际工艺在脚本中修改。链接:https://pan.baidu.com/s/1lmBxH6k3nqSe-b1o1cDkWw提取码:9e8i1.…
分享
手机扫码分享
复制链接
1
1218
5.
上位机触发机器人进入拖动模式
CS机器人可以通过配置DI信号,外部触发机器人进入拖动模式。在机器人程序未运行时,也可以通过以下指令让机器人进入拖动模式:基于29999端口的dashboard:freeDrive -on/-off基于30001端口的:set freedrive mode True
分享
手机扫码分享
复制链接
1
1003
6.
CS机器人获取真实MDH参数及正运动学计算
CS系列机器人采用MDH方法建模,MDH数据见 https://bbs.elibot.cn/forum/detail/topic/186.html用户可以通过解析机器人30001端口的数据,获得当前机器人的MDH数据关于30001返回数据解析,可以通过以下链接获得链接:https://pan.baidu.com/s/1jRJHMvMvGpN…
分享
手机扫码分享
复制链接
1
1002
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册协议》条款
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件