
1.1 配置启动程序与信号
1.机器人开机完成后,选择左侧配置--找到启动选项--选择开机自动加载的任务---选择启动任务的信号--选择自动释放抱闸的信号。

2.1切换控制方式为远程。
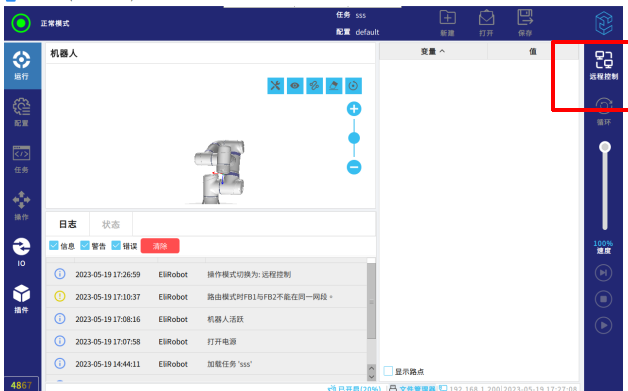
机器人控制柜需手动上电,示教器可以通过远程开关来控制启动与关闭。
1:找到控制上远程端子排
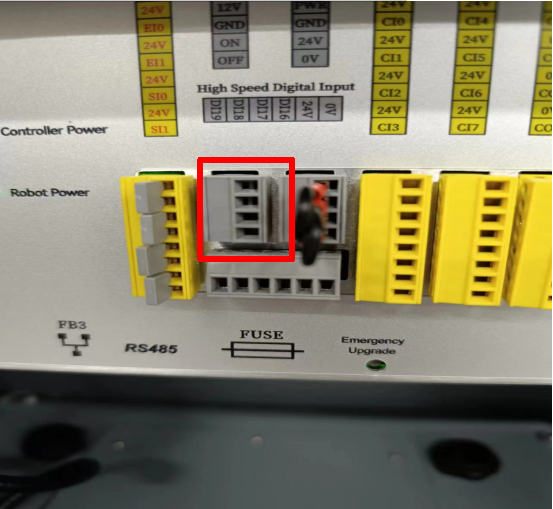
2. 接线方式如下:
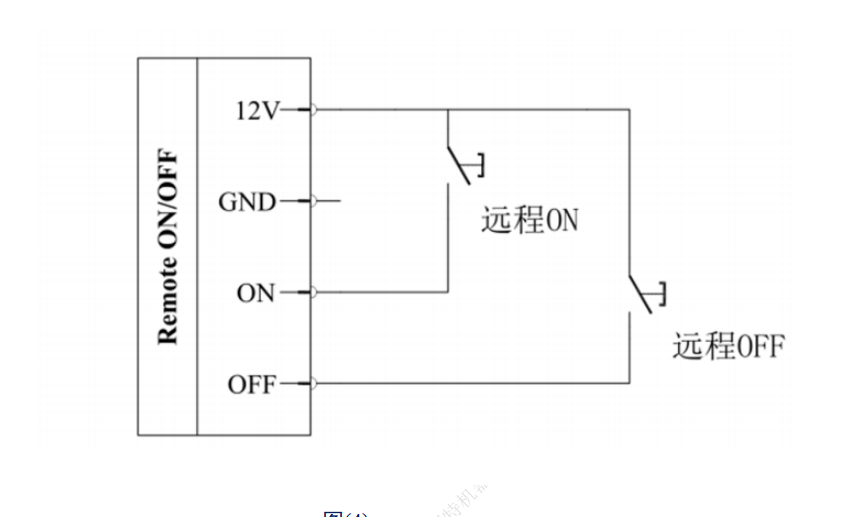
启动顺序:
1:开启示教器,远程端子上12V与ON相连。
2:给出解抱闸信号,图示(1),为di1.
3:解抱闸完成后,可给出启动信号,图示(1)为di3.
状态输出插件:
如需机器人反馈启动状态信号至输出,可添加插件robotState-1.2.3.0

附:插件robotState-1.2.3.0
链接:https://pan.baidu.com/s/1E3GsLykT7kTb_fKL_rLVZQ
提取码:elit





