
The user can implement sdk functions by sending a json format string to the port 8055 of robot controller through socket communication
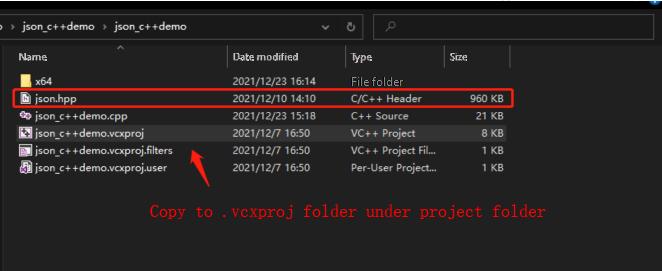
Copy json.hpp file to project folder under .vcxproj folder.
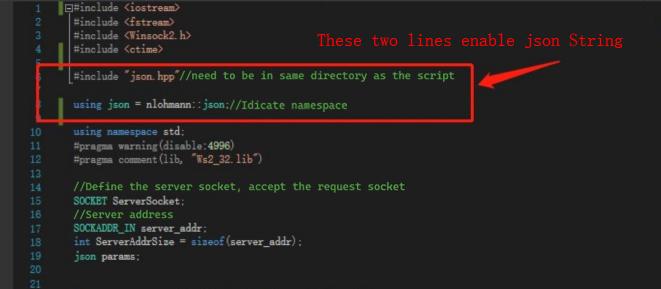
Add #include "json.hpp" to front of the code.
Indicate namespace with using json = nlohmann::json
#include <iostream>
#include <fstream>
#include <winsock.h>
#include <ctime>
#include "json.hpp"//need to be in same directroy as the script
using json = nlohmann::json;//Indicate namespace
using namespace std;
#pragma warning(disable:4996)
#pragma comment(lib, "Ws2_32.lib")
//Define the server socket, accept the request socket
SOCKET ServerSocket;
//Server address
SOCKADDR_IN server_addr;
int ServerAddrSize = sizeof(server_addr);
json params;
int connectETController(string ip, int port){
WORD w_req = MAKEWORD(2, 2);//version
WSADATA wsadata;
int err;
err = WSAStartup(w_req, &wsadata);
if (err != 0) std::cout << "Initialize socket library FAILED!" << std::endl;
else std::cout << "Initialize socket library SUCCESSED!" << std::endl;
if (LOBYTE(wsadata.wVersion) != 2 || HIBYTE(wsadata.wHighVersion) != 2) {//Check the version number
std::cout << "Socket library version doesn't match!" << std::endl;
WSACleanup();
}
else std::cout << "Socket library version correct!" << std::endl;
// Fill in the server address information
server_addr.sin_family = AF_INET;
server_addr.sin_addr.S_un.S_addr = inet_addr(ip.c_str());
server_addr.sin_port = htons(port);
// Create socket
ServerSocket = socket(AF_INET, SOCK_STREAM, 0);
// Copying files from the system buffer to the socket buffer doesn't affect the program performance
int nZero = 0;
setsockopt(ServerSocket, SOL_SOCKET, SO_SNDBUF, (char *)& nZero, sizeof(nZero));
// Setup non-blocking FIONBIO
u_long is_non_block = 1;
int ret = ioctlsocket(ServerSocket, FIONBIO, &is_non_block);
ret = connect(ServerSocket, (struct sockaddr *) &server_addr, sizeof(server_addr));
fd_set fsWrite;
FD_ZERO(&fsWrite);
FD_SET(ServerSocket, &fsWrite);
struct timeval timeout;
timeout.tv_sec = 1;
timeout.tv_usec = 0;
ret = select(0, 0, &fsWrite, 0, &timeout);
if (ret == 0) {
printf("Connecting to server failed! Please check network cable and IP address\n");
return -1;
}
else{
is_non_block = 0;
ret = ioctlsocket(ServerSocket, FIONBIO, &is_non_block);
cout << "Connecting to server succeeded!" << endl;
return 1;
}
}
json sendcmd(string method, json Params, int id, ...) {
json send, recv_json;
char RecvBuf[1024] = "";
string SendBuf = "";
string filname;
fstream f;
int send_len = 0, recv_len = 0, BufLen = 1024;
auto s2 = Params.size();
if (s2 == 0){
send = { {"jsonrpc","2.0"},{"method",method},{"id",id} };
}
else{
send = { {"jsonrpc","2.0"},{"method",method},{"params",Params},{"id",id} };
}
string str = send.dump() + "\r\n";//Convert json to string type serialization
cout << "serializing:" << send << endl;
//Receive data returned from the server
send_len = sendto(ServerSocket, str.c_str(), str.size(), 0, (SOCKADDR*)&server_addr,
sizeof(server_addr));
recv_len = recvfrom(ServerSocket, RecvBuf, BufLen, 0, (SOCKADDR*)&server_addr, &ServerAddrSize);
//convert string to json deserialization
recv_json = json::parse(RecvBuf);
cout << "Deserialize:" << recv_json << endl;
int read_id = recv_json["id"];
if (recv_json["result"] == nullptr){
recv_json["result"] = false;
params.clear();
return recv_json;
}
string read_result = recv_json["result"];
int start = read_result.find("[");
if (start > -1){
int end = read_result.find_last_of("]");
if (end > -1){
string ret_str = read_result.substr(start + 1, end - 1);
start = ret_str.find("[");
while (start != -1) {
ret_str.replace(start, string("[").length(), "");
start = ret_str.find("[");
}
end = ret_str.find_last_of("]");
while (end != -1) {
ret_str.replace(end, string("]").length(), "");
end = ret_str.find("]");
}
vector<double> result;
string::size_type i = 0;
string::size_type found = ret_str.find(",");
while (found != string::npos) {
result.push_back(atof(const_cast<const char *>(ret_str.substr(i, found - i).c_str
())));
i = found + 1;
found = ret_str.find(",", i);
}
result.push_back(atof(const_cast<const char *>(ret_str.substr(i, ret_str.size() -
i).c_str())));
recv_json["result"] = result;
}
}
params.clear();
return recv_json;
}
int main(){
json json_result;
int ret = connectETController("192.168.2.100", 8055);
if (ret == 1){
std::cout << "Connecting to Robot succeeded\n";
}
else{
std::cout << "Connecting to robot failed! Please check network cable and IP address\n";
}
json_result = sendcmd("getRobotState", params, 1); //Obtain robot status
if (json_result["result"]=="4"){
json_result = sendcmd("clearAlarm", params, 1); //Clear Alarm
}
json_result = sendcmd("getMotorStatus", params, 1); //Obtain motor status
if (json_result["result"]=="false"){
json_result = sendcmd("syncMotorStatus", params, 1); //Motor synchronization
}
json_result = sendcmd("getServoStatus", params, 1); //Obtain Servo Status
if (json_result["result"] == "false"){
params["status"] = 1;
json_result = sendcmd("set_servo_status", params, 1); //Set Servo to ON
}
json_result = sendcmd("getRobotPose", params, 1); //Obtain robot pose
json_result = sendcmd("getRobotPos", params, 1); //Obtain robot position
} #include <iostream>
#include <fstream>
#include <Winsock2.h>
#include <ctime>
#include "json.hpp"//need to be in same directroy as the script
using json = nlohmann::json;//Indicate namespace
using namespace std;
#pragma warning(disable:4996)
#pragma comment(lib, "Ws2_32.lib")
//Define the server socket, accept the request socket
SOCKET ServerSocket;
//Server address
SOCKADDR_IN server_addr;
int ServerAddrSize = sizeof(server_addr);
json params;
int connectETController(string ip, int port){
//Initialize the socket library
WORD w_req = MAKEWORD(2, 2);//version
WSADATA wsadata;
int err;
err = WSAStartup(w_req, &wsadata);
if (err != 0) {
cout << "Initialize socket library FAILED!" << endl;
}
else {
cout << "Initialize socket library SUCCESSED!" << endl;
}
//检测版本号
if (LOBYTE(wsadata.wVersion) != 2 || HIBYTE(wsadata.wHighVersion) != 2) {
cout << "Socket library version doesn't match!" << endl;
WSACleanup();
}
else {
cout << "Socket library version correct!" << endl;
}
// Fill in the server address information
server_addr.sin_family = AF_INET;
server_addr.sin_addr.S_un.S_addr = inet_addr(ip.c_str());
server_addr.sin_port = htons(port);
// Create socket
ServerSocket = socket(AF_INET, SOCK_STREAM, 0);
// Copying files from the system buffer to the socket buffer doesn't affect the program performance
int nZero = 0;
setsockopt(ServerSocket, SOL_SOCKET, SO_SNDBUF, (char *)& nZero, sizeof(nZero));
// Setup non-blocking FIONBIO
u_long is_non_block = 1;
int ret = ioctlsocket(ServerSocket, FIONBIO, &is_non_block);
ret = connect(ServerSocket, (struct sockaddr *) &server_addr, sizeof(server_addr));
fd_set fsWrite;
FD_ZERO(&fsWrite);
FD_SET(ServerSocket, &fsWrite);
struct timeval timeout;
timeout.tv_sec = 1;
timeout.tv_usec = 0;
ret = select(0, 0, &fsWrite, 0, &timeout);
if (ret == 0) {
printf("Connecting to server failed! Please check network cable and IP address\n");
return -1;
}
else{
is_non_block = 0;
ret = ioctlsocket(ServerSocket, FIONBIO, &is_non_block);
cout << "Connecting to server succeeded!" << endl;
return 1;
}
}
json sendcmd(string method, json Params, int id, ...) {
json send, recv_json;
char RecvBuf[1024] = "";
string SendBuf = "";
string filname;
fstream f;
int send_len = 0, recv_len = 0, BufLen = 1024;
auto s2 = Params.size();
if (s2 == 0){
send = { {"jsonrpc","2.0"},{"method",method},{"id",id} };
}
else{
send = { {"jsonrpc","2.0"},{"method",method},{"params",Params},{"id",id} };
}
string str = send.dump() + "\r\n";//Convert json to string type serialization
cout << "serializing:" << send << endl;
//Receive data returned from the server
send_len = sendto(ServerSocket, str.c_str(), str.size(), 0, (SOCKADDR*)&server_addr, sizeof(server_addr));
recv_len = recvfrom(ServerSocket, RecvBuf, BufLen, 0, (SOCKADDR*)&server_addr, &ServerAddrSize);
//convert string to json deserialization
recv_json = json::parse(RecvBuf);
cout << "Deserialize:" << recv_json << endl;
int read_id = recv_json["id"];
if (recv_json["result"] == nullptr){
recv_json["result"] = false;
params.clear();
return recv_json;
}
string read_result = recv_json["result"];
int start = read_result.find("[");
if (start > -1){
int end = read_result.find_last_of("]");
if (end > -1){
string ret_str = read_result.substr(start + 1, end - 1);
start = ret_str.find("[");
while (start != -1) {
ret_str.replace(start, string("[").length(), "");
start = ret_str.find("[");
}
end = ret_str.find_last_of("]");
while (end != -1) {
ret_str.replace(end, string("]").length(), "");
end = ret_str.find("]");
}
vector<double> result;
string::size_type i = 0;
string::size_type found = ret_str.find(",");
while (found != string::npos) {
result.push_back(atof(const_cast<const char *>(ret_str.substr(i, found - i).c_str())));
i = found + 1;
found = ret_str.find(",", i);
}
result.push_back(atof(const_cast<const char *>(ret_str.substr(i, ret_str.size(
) - i).c_str())));
recv_json["result"] = result;
}
}
params.clear();
return recv_json;
}
int main(){
json json_result;
double targetPos[8] = {0,0,0,0,0,0,0,0};
double targetPose[6] = {0,0,0,0,0,0};
int ret = connectETController("192.168.2.100", 8055);
if (ret == 1){
std::cout << "Connecting to Robot succeeded\n";
}
else{
std::cout << "Connecting to robot failed! Please check network cable and IP address\n";
}
json_result = sendcmd("getRobotState", params, 1); //Obtain robot status
if (json_result["result"]=="4"){
json_result = sendcmd("clearAlarm", params, 1); //Clear Alarm
}
json_result = sendcmd("getMotorStatus", params, 1); //Obtain motor status
if (json_result["result"]=="false"){
json_result = sendcmd("syncMotorStatus", params, 1); //Motor synchronization
}
json_result = sendcmd("getServoStatus", params, 1); //Obtain Servo Status
if (json_result["result"] == "false"){
params["status"] = 1;
json_result = sendcmd("set_servo_status", params, 1); //Set Servo to ON
}
params["targetPos"] = {0,-90,0,-90,90,0,0,0}, params["speed"]=20, params["acc"] = 20, params["dec"] = 20;
json_result = sendcmd("moveByJoint", params, 1); //Joint Move
json_result = sendcmd("getRobotState", params, 1); //Obtain robot status
while (json_result["result"] != "0"){
json_result = sendcmd("getRobotState", params, 1); //Obtain robot status
}
json_result = sendcmd("getRobotState", params, 1); //Obtain robot status
params["targetPos"] = { -90,-90,90,-90,90,-90,0,0 }, params["speed"] = 20, params["acc"] = 20, params["dec"] = 20;
json_result = sendcmd("moveByJoint", params, 1); //Joint Move
while (json_result["result"] != "0"){
json_result = sendcmd("getRobotState", params, 1); //Obtain robot status
}
json_result = sendcmd("getRobotPos", params, 1); //Obtain robot pose
for (int i = 0; i < json_result["result"].size(); i++){
targetPos[i] = json_result["result"][i];
}
json_result = sendcmd("getRobotPose", params, 1);
for (int i = 0; i < json_result["result"].size(); i++){
targetPose[i] = json_result["result"][i];
}
targetPose[0] = targetPose[0] - 100;
params["targetPose"] = targetPose, params["referencePos"] = targetPos, params["unit_type"] = 1;
json_result = sendcmd("inverseKinematic", params, 1); //Inverse Kinematics
params["targetPos"] = json_result["result"], params["speed"] = 100, params["acc"] = 20, params["dec"] = 20;
json_result = sendcmd("moveByLine", params, 1); //Linear Move
}






