RoboDK提供了离线轨迹生成功能,配合文末的Elibot后处理程序,就可以将RoboDK生成的离线轨迹直接导入EC机器人使用。
1. 将Elite机器人后处理程序 Elibot_V2.py, Elibot_V3.py, Elibot_MovE.py放置到RoboDK安装路径下的Posts文件夹下(区别会在下文中介绍)。
若使用Elibot_V3.py,需将robodk_transfer_user.lua放置到机器人控制器的luadir文件夹下。
下载链接:https://pan.baidu.com/s/1BKCAZFel9HqWl6i_sPgBtA 提取码:b8rb
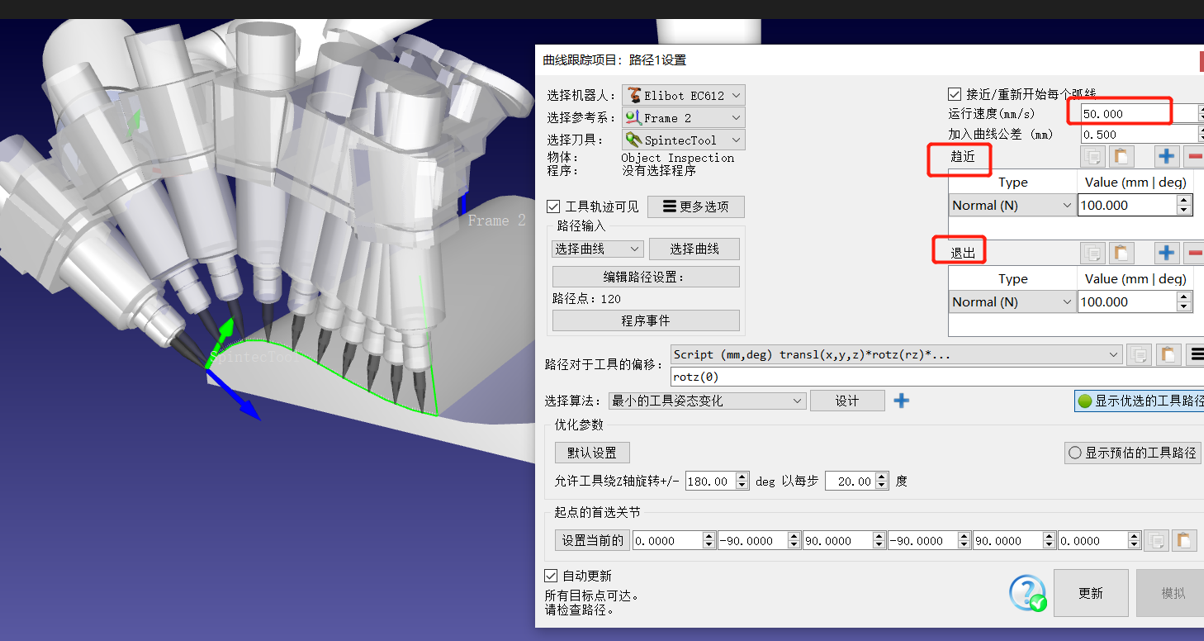
2. 在robodk中创建工具,通过“实用程序”-“曲线跟踪项目”,创建机器人轨迹。设置参数如下,包括运动速度,是否要接近点等。
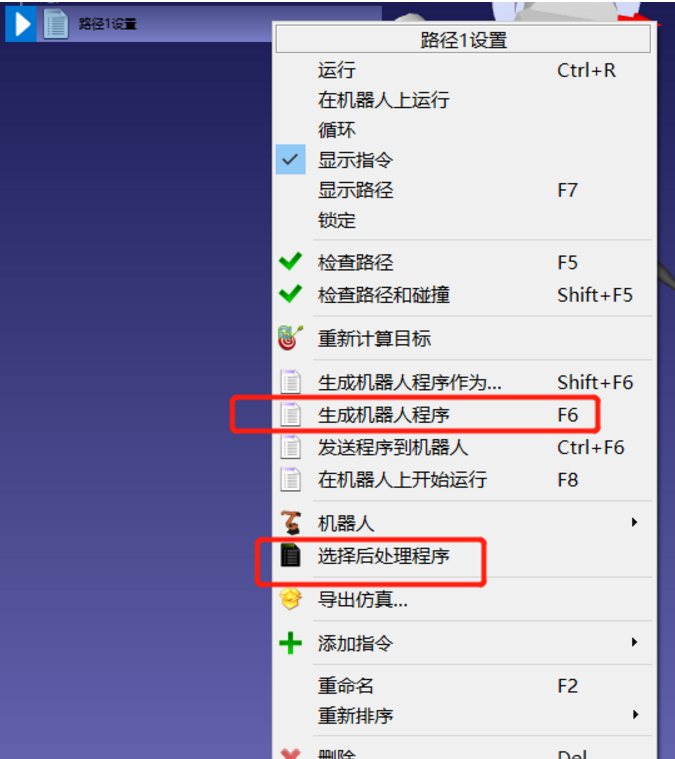
3. 可以右击生成的程序,查看指令。
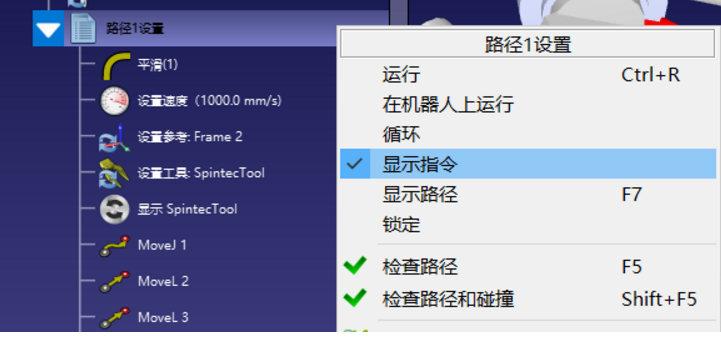
4. 右击程序,选择后处理程序,
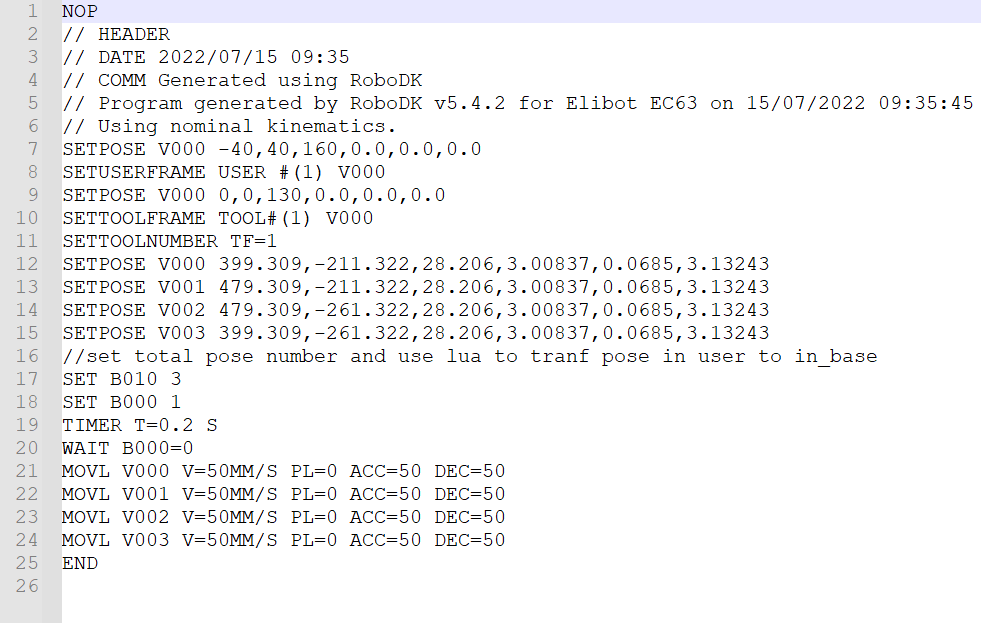
Elibot_V2.py输出为SETJOINT 和对应MOVJ Pxxx格式,无坐标系。程序首行自动设置对应tool
Elibot_V3.py输出为SETPOSE 和对应MOVL Vxxx格式,程序首行还有设置TOOL和user坐标系内容(现场使用建议使用这个,重新修正user坐标系就好),使用tool1和user1。需要将robodk_transfer_user.lua先导入机器人程序。运行时,robodk_transfer_user.lua会把user1下的pose转为base下的pose运行。
对于V3.5以上版本的机器人(可以使用movE指令),可以直接使用Elibot_movE.py 而非V3,不再需要上述lua文件转换,输出的程序直接使用movE指令(指令里带tool和user,MOVEJ后使用joint点,MOVEL和MOVEC后使用cart点,导出结果示例: