机器人程序如下
SETPOSE V000 350,-150,13.2724056,3.1415798,0.0000188,-1.5708183
SETPOSE V001 350,0,13.2709000,3.1415850,0.0000091,-1.5708254
SETPOSE V002 450,0,13.2757791,-3.1415766,0.0000019,-1.5708575
DOUT OT#(0) OFF
MOVL V000 V=100MM/S CR=0.0MM ACC=50 DEC=50
MOVL V001 V=50MM/S CR=20.0MM ACC=50 DEC=50
DOUT OT#(0) ON
MOVL V002 V=50MM/S CR=0.0MM ACC=50 DEC=50
DOUT OT#(0) OFF
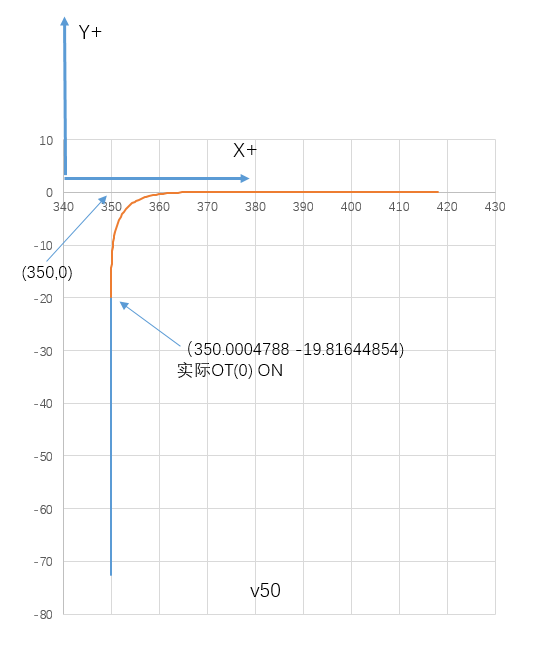
机器人会在进入目标点的交融半径20mm范围内,触发下一条do。实际测试触发位置如下图。