コードは下記の通り(// に続くのはコメントです):
//三つの点を設定された
SETPOSE V000 350,-150,13.2724056,3.1415798,0.0000188,-1.5708183
SETPOSE V001 350,0,13.2709000,3.1415850,0.0000091,-1.5708254
SETPOSE V002 450,0,13.2757791,-3.1415766,0.0000019,-1.5708575
//出力命令
DOUT OT#(0) OFF
//移動命令、V001に移動命令でCRが20㎜設定された
MOVL V000 V=100MM/S CR=0.0MM ACC=50 DEC=50
MOVL V001 V=50MM/S CR=20.0MM ACC=50 DEC=50
//出力命令
DOUT OT#(0) ON
MOVL V002 V=50MM/S CR=0.0MM ACC=50 DEC=50
DOUT OT#(0) OFF
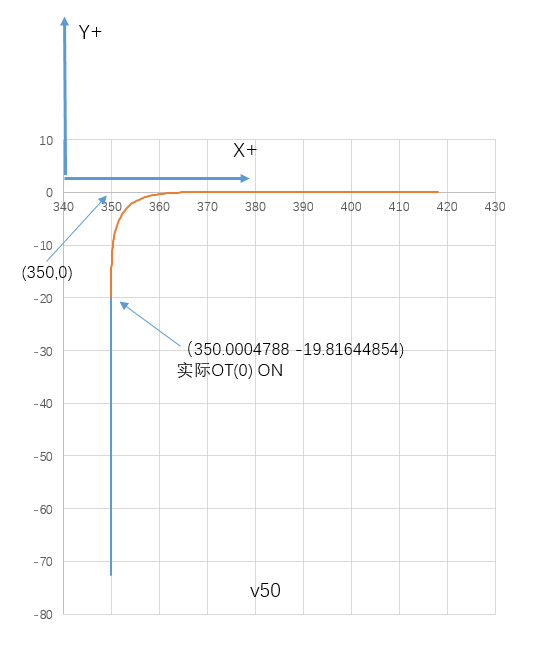
ロボットは、ターゲット ポイントからブレンド半径 CR=20mm の範囲内で次のステートメントの実行をトリガーします。
つまり、実際のテスト トリガー位置は次のようになります: