Elite EC robot officially supports EthernetIP communication from V3.5 (the robot acts as an adapter server), without special setup for the robot.
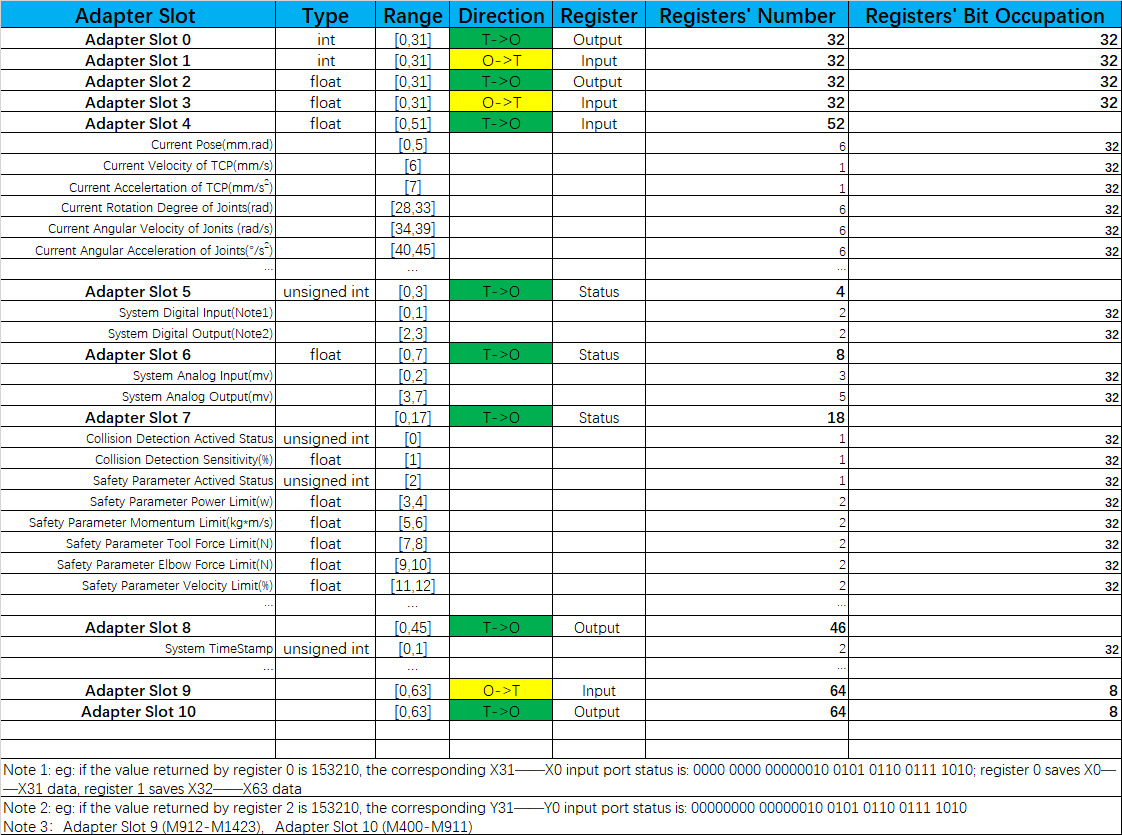
EN_IP communication for Elite EC series provides 11 groups from slot0 to slot10. For more details, please refer to the EC communication manual of V3.5.2 and above. Slot9 corresponds to M Input (starting from M912), slot10 corresponds to M output (starting from M400), and slot4 can read the robot pose, etc.
In this example, CODESYS is used as the EthernetIP Scanner (master) to show the configuration. Please follow the steps to configure it.
1. First of all please install CODESYS 3.5 sp15
2. Open CODESYS and create a new project.
3. Open CODESYS menu - Tools - Device Repository, click "Install" to import the EC robot eds file corresponding to version 3.5. Once imported successfully, a prompt will appear, and the file will appear under Ethernet/IP.

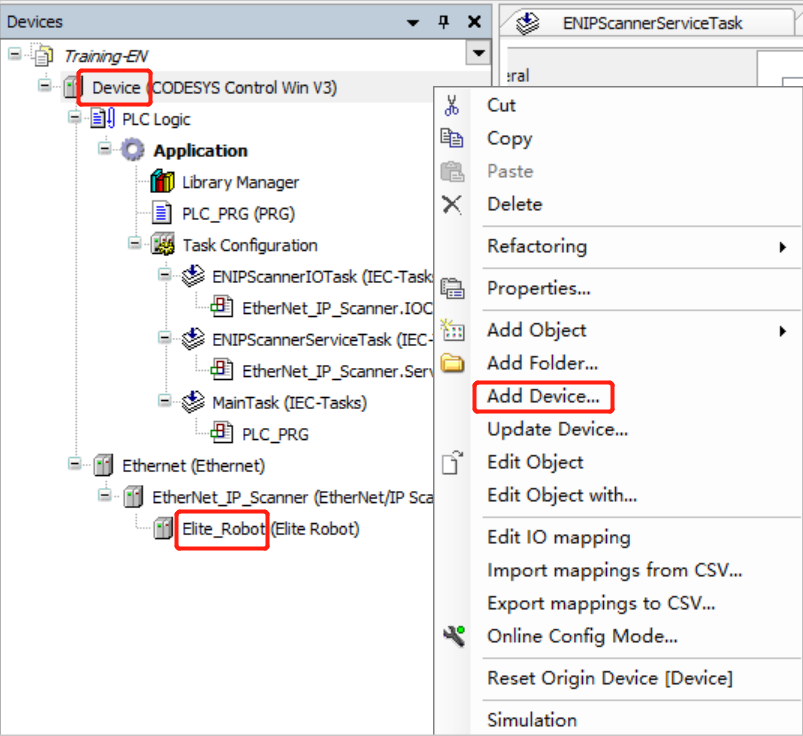
4. Add an EC robot device to CODESYS, as shown below. And set the master station IP and robot IP (the same as the actual)
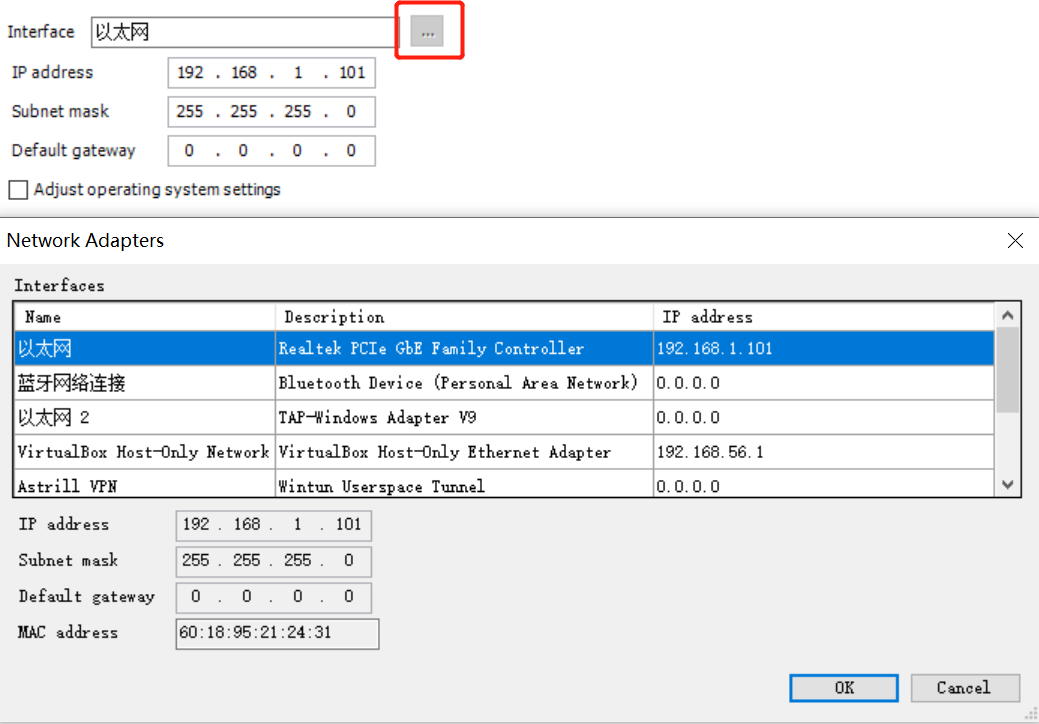
5.When configuring PC ip at Ethernet-General, please select the corresponding interface.
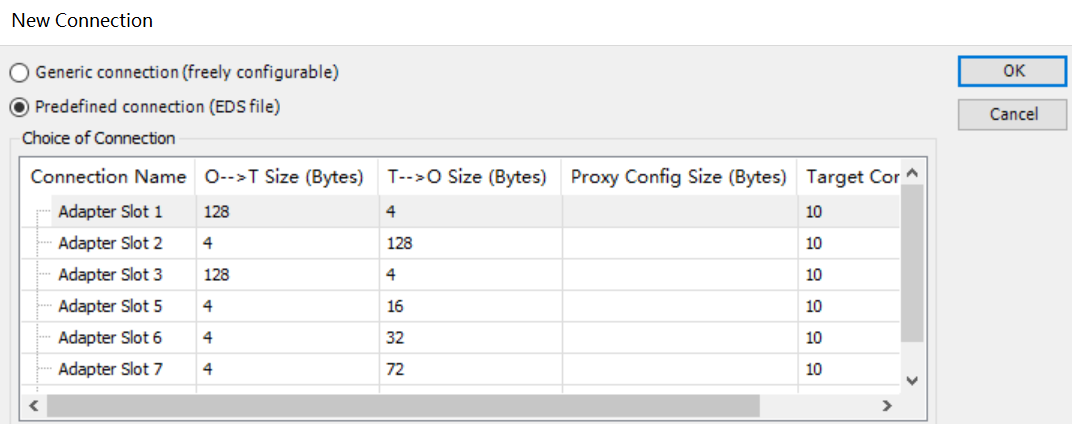
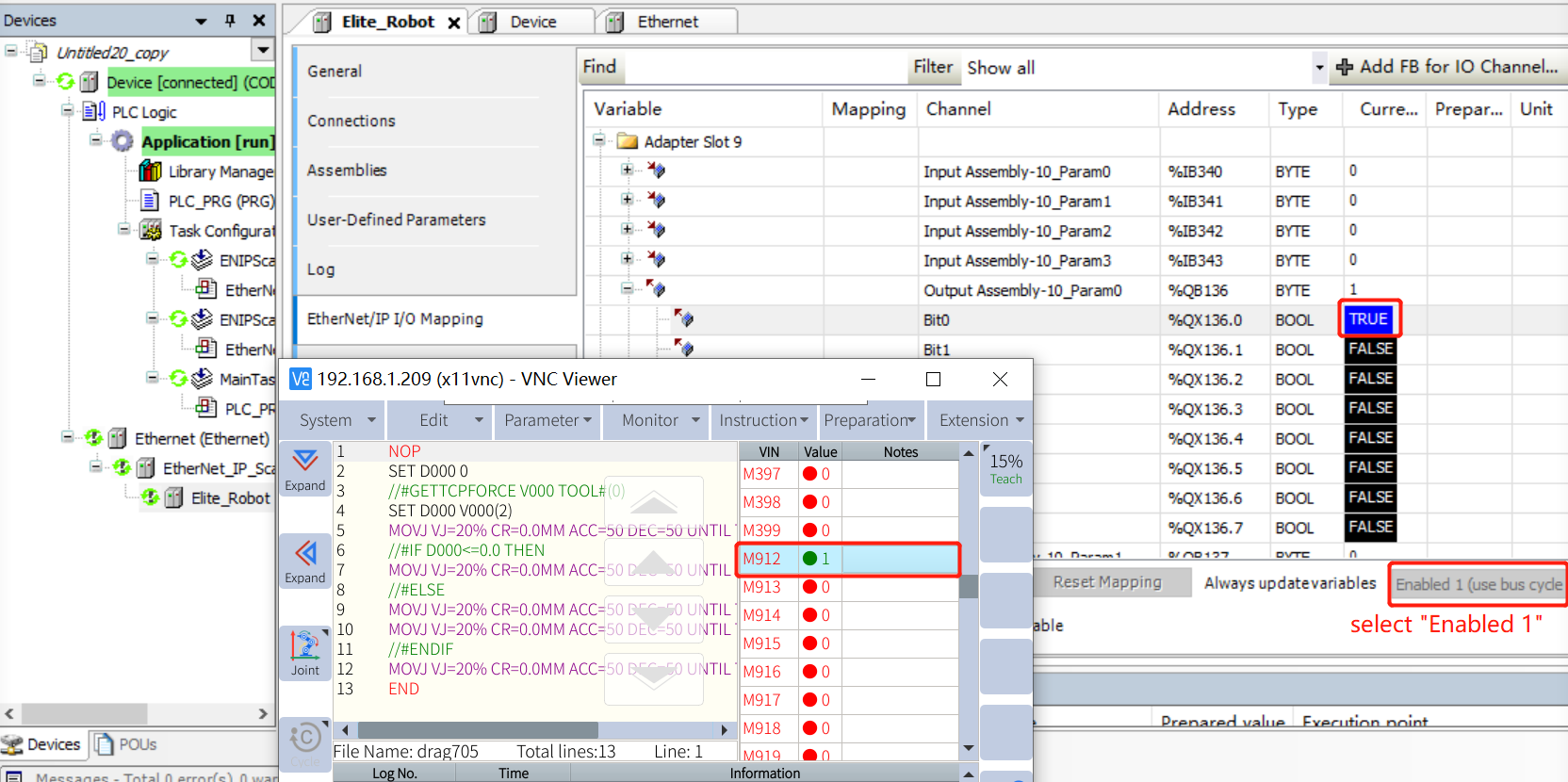
6. Now we can prepare to monitor and modify M coils. Double-click Elite_Robot in step 7, add slot9 and slot10 as shown in the figure below. You can find them in Elite_Robot - Ethernet Device I/O Mapping later.

7. At the beginning menu of the computer windows, open CODESYS Control Win V3-x64 as shown in the picture below, and start CODESYS plc. Please ensure that CODESYS plc and gateway are activated.



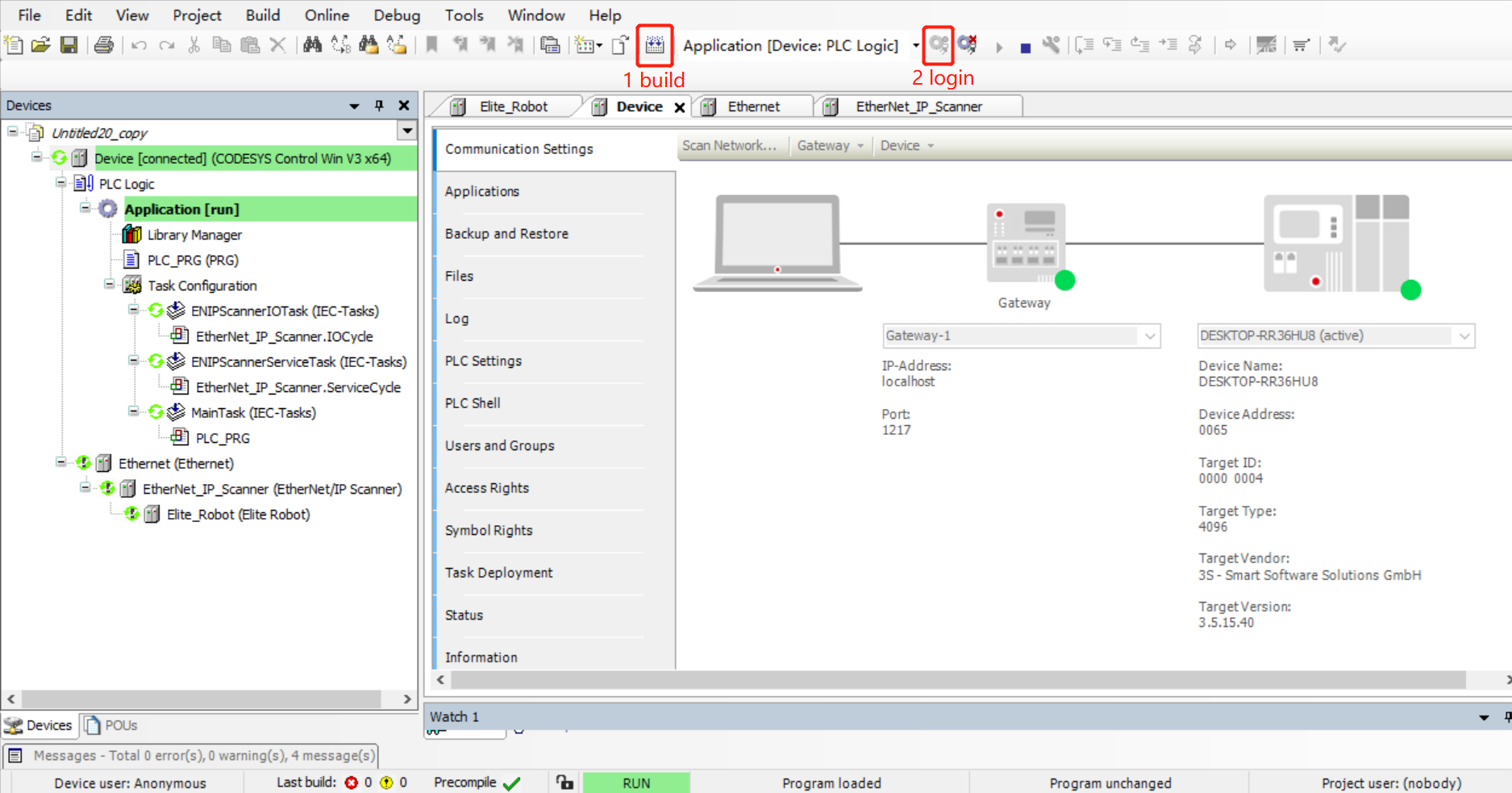
8. Please click "build" and "login" as shown in the above picture, the page will then indicate it is running normally.
9.Please click the button as above to monitor the M output. For M input, we can write in the “Prepared Value” and press ctrl+F7 to write value.

10. In order to modify the configuration, please first click the "Logout" button next to the "Login" button
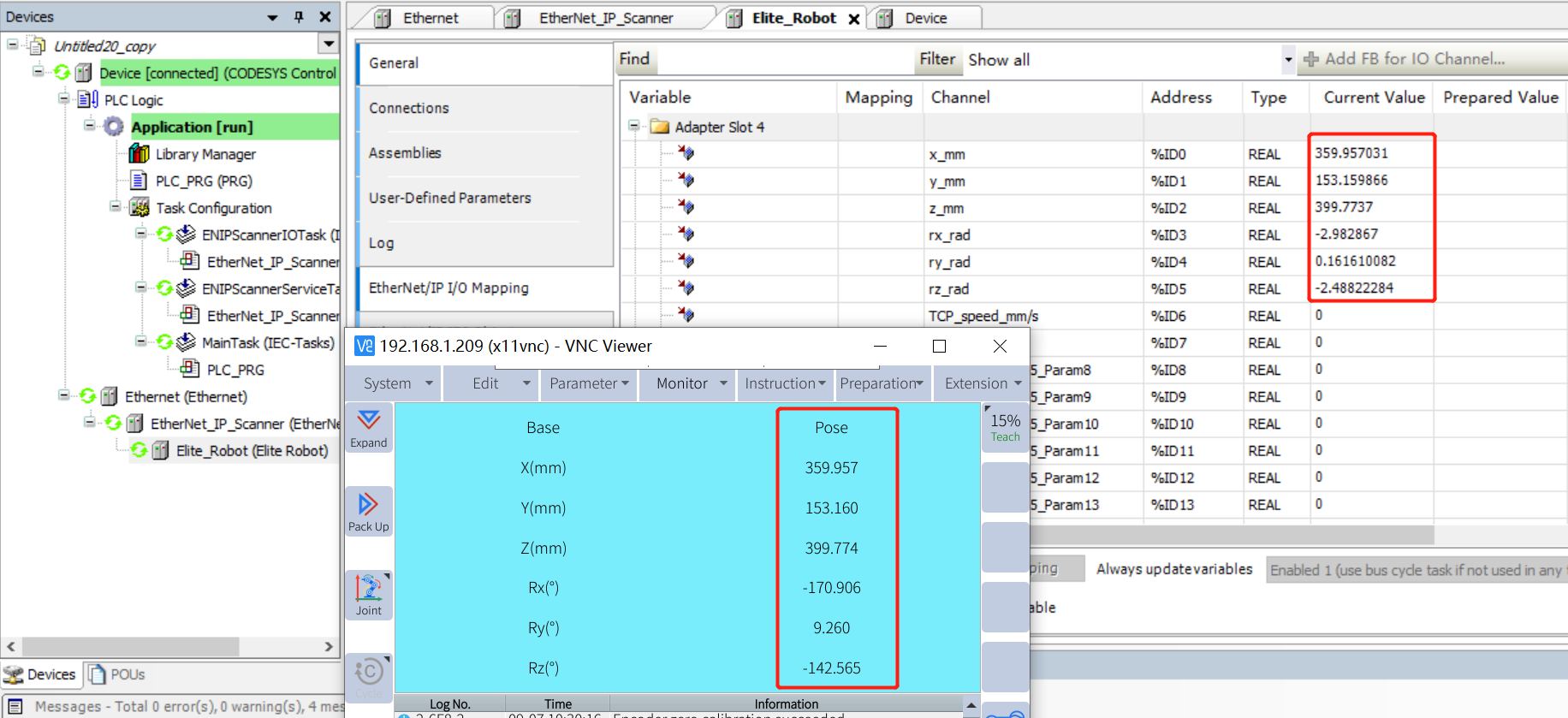
11. To monitor the current position of the robot, slot4 is suggested to be inserted. For robot position, every parameter is 32bit float data, corresponding to REAL type in CODESYS. The total length of slot4 is 208 bytes. We can modify it according to the following figure (which means to modify the first parameter to REAL, and so on, we can modify it to 0-51 REAL variables. Note: please delete the last extra bytes to ensure that slot4 is the input of 208 bytes. )

12. INT data and FLOAT data can also be read and written through EN-IP (The robot needs to have the corresponding LUA script, please refer to the EC V3.5.2 communication manual)
Note: