
Please ensure the robot and the PC are in the same network.
Put ElibotDriver.py to the Installation path of robodk,default path:C:\RoboDK\api\Robot
Open RoboDK,create a new station and import the corresponding robot model(Elite robot model can be found and downloaded by clicking"Open online Library")
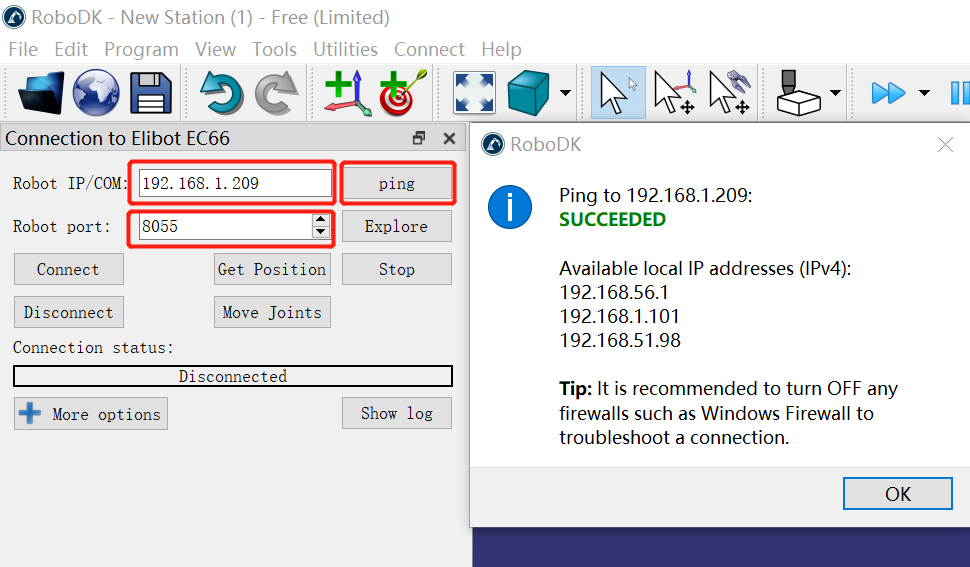
Click "Connect-Connect robot" in the menu bar,Enter the corresponding robot IP and port(8055),as shown in the picture below. Click "ping" to check.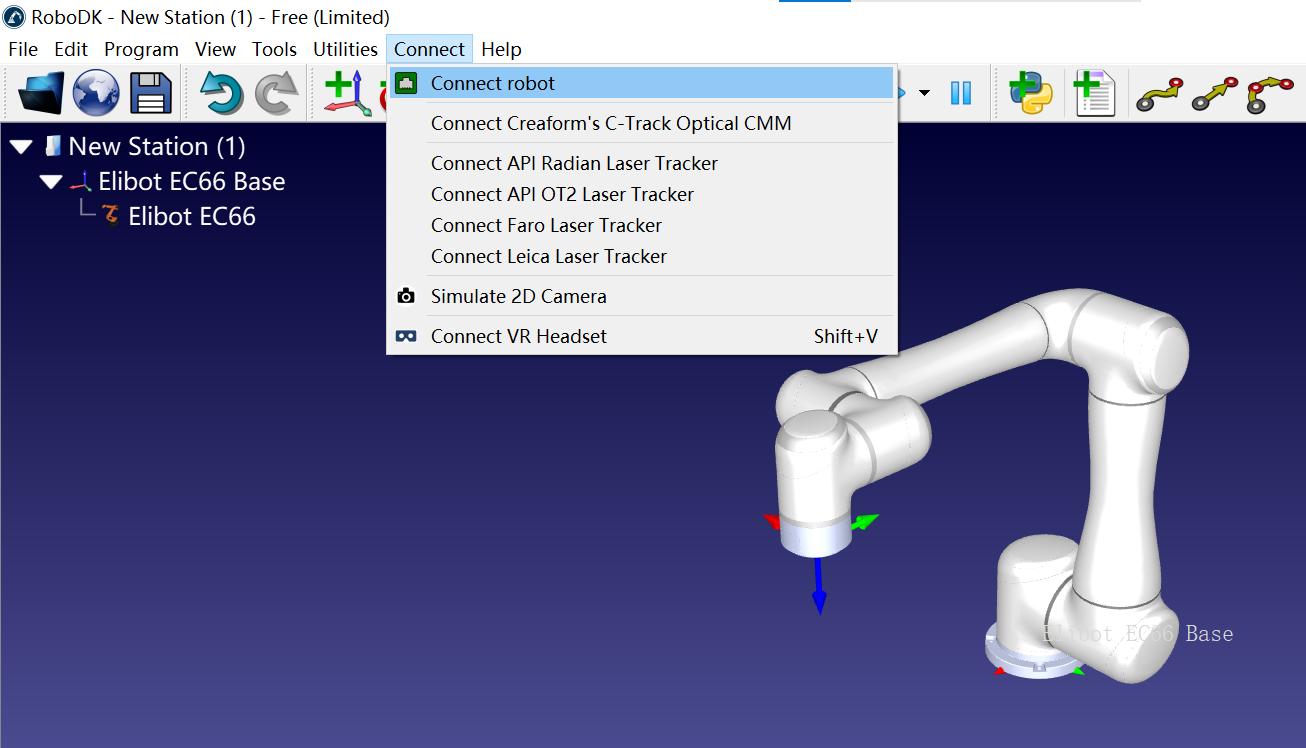
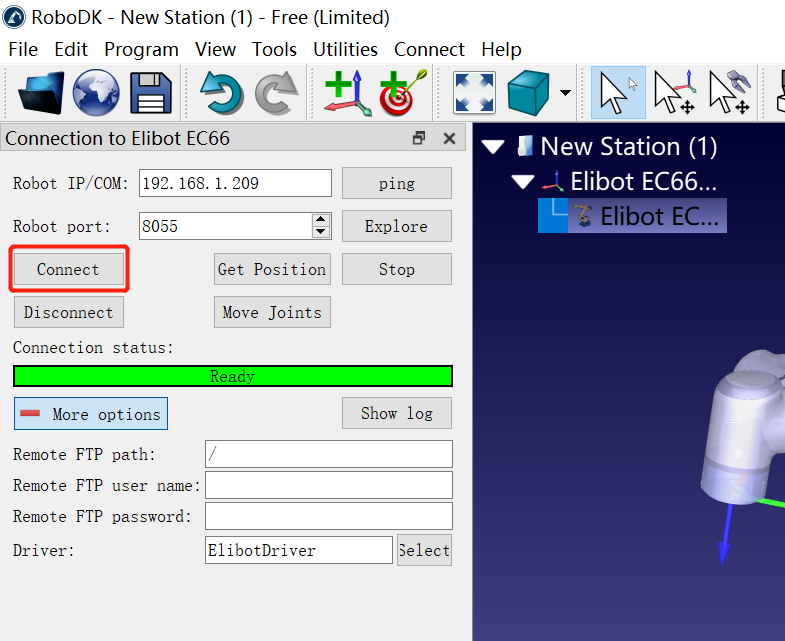
Then click "Connect". Once the connection is successful, the robot model will automatically synchronize the current pose of the actual robot
You can now drag the robot model in RoboDK and click on "Move Joints" or "Line Motion" (The robot needs to be in remote mode and servo on) The robot will automatically move to the corresponding location





