
This driver is a monitoring driver, it gets the actual joint information of the robot and sends to RoboDK, so the robot model in the RoboDK simulation interface will synchronize with the actual robot.
!!! Please make sure to check Python Environment when installing
Please make sure RoboDK is installed
Please make sure you have a Python interpreter environment (you can choose to install it when installing robodk)
Make sure that python has the robot library installed (when installing RoboDK, the installation of python interpreter will come with the installation of the library, if not, please install it through 'pip install robodk')
Please make sure the actual robot and your PC are in the same internet
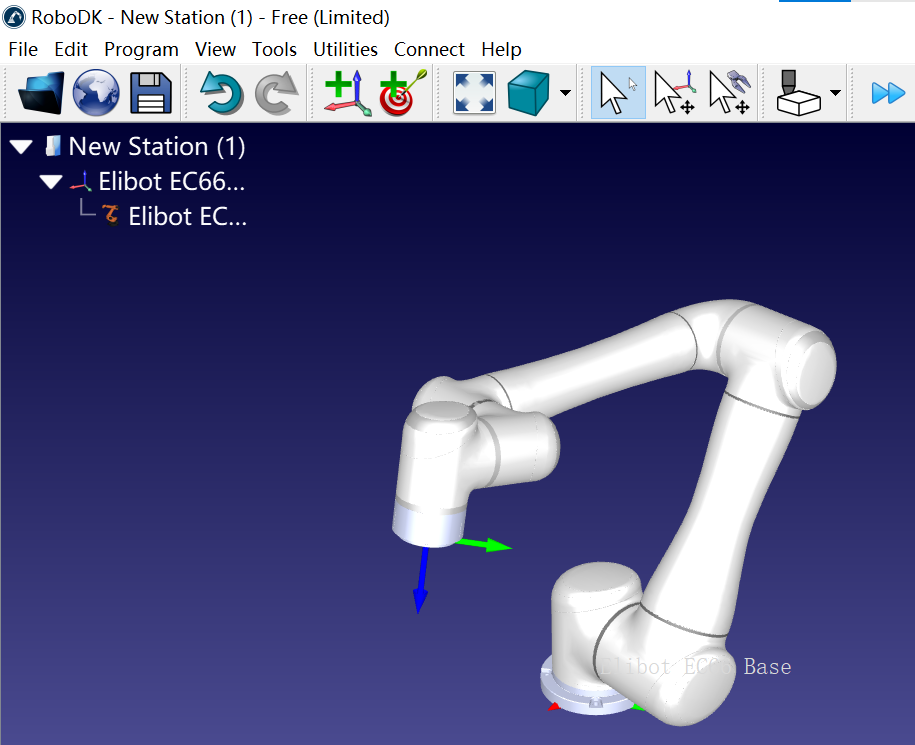
Please create a new station in the RoboDK and open the corresponding Elite robot model(Elite robot model can be found and downloaded by clicking"Open online Library"), as shown in the following picture:

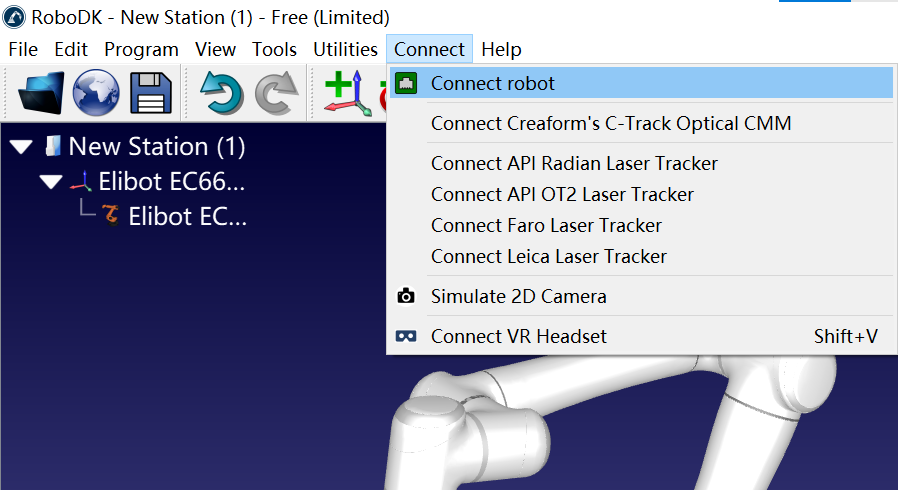
Click "Connect-Connect robot"
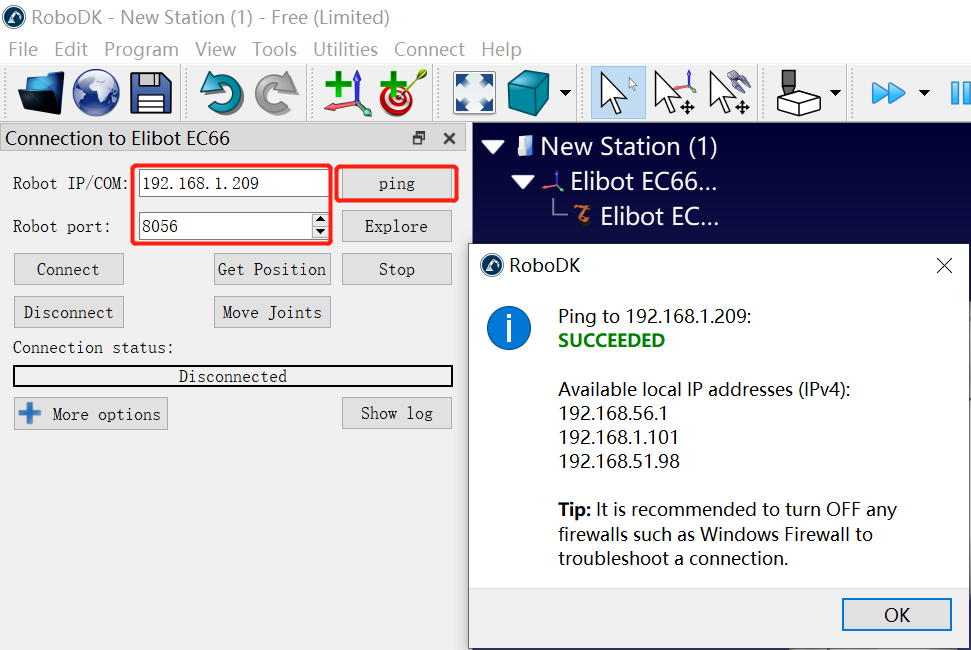
Enter the corresponding Robot IP/COM (the same as the actual robot IP) and the Robot port (must be 8056), then click "Ping" to test. If failed, it means that the actual robot and your PC are not in the same internet.
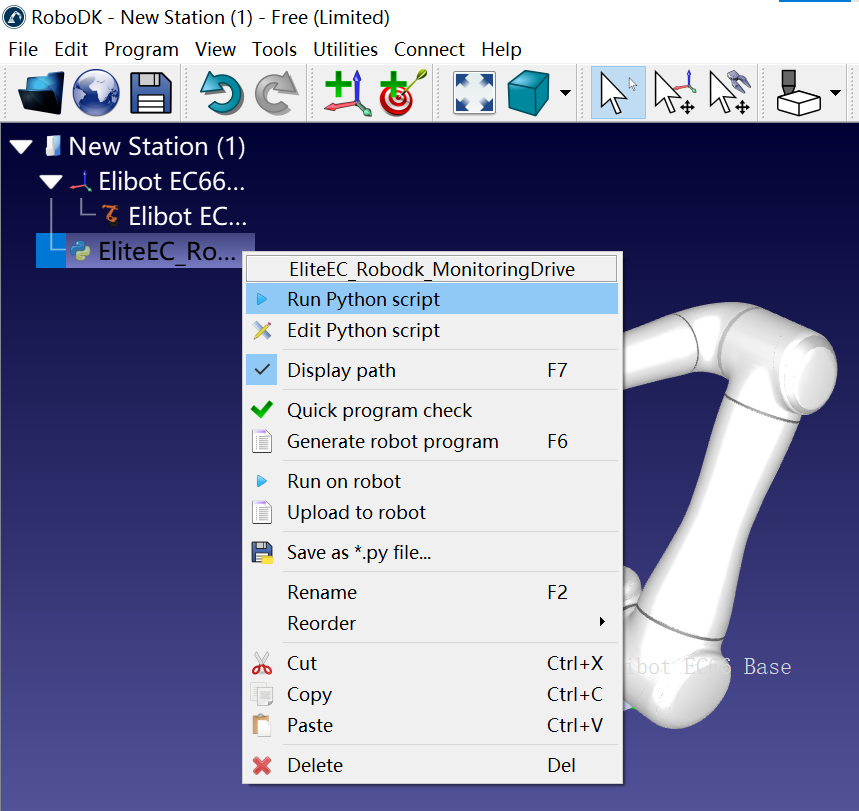
Open EliteEC_Robodk_MonitoringDrive.py in RoboDK and right click to run the Python script directly, the model in RoboDK will then synchronize with the actual robot pose. The model in RoboDK will move as the actual robot moves.
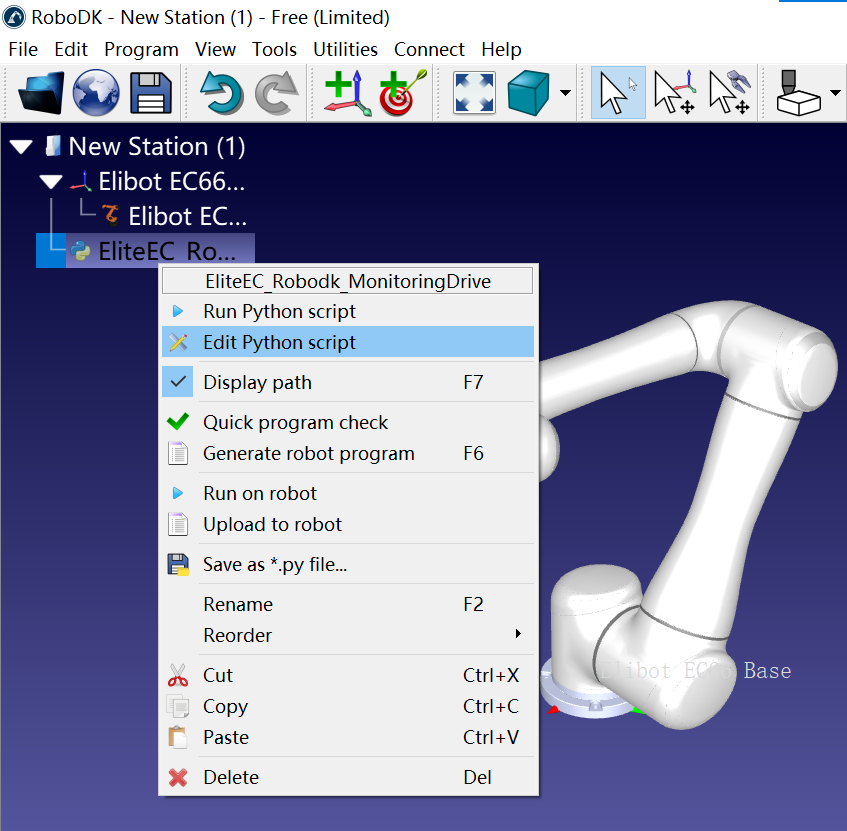
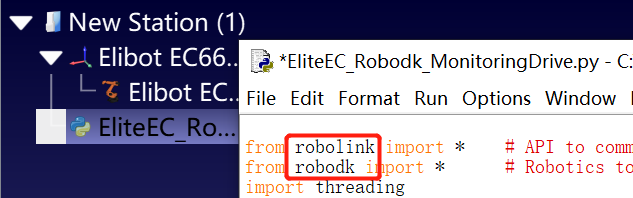
If it doesn't work, please right click to edit the Python script and ensure that there is no extra words.
Or add a Python program to the robot, as shown in the following figure:
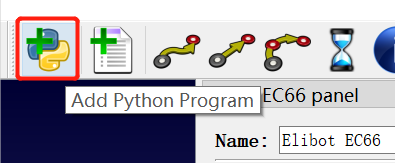
Copy and paste the driver content in "Edit Python Script", save it, and right click to run Python script.
# Create targets given a tolerance in degrees
CREATE_TARGETS = True #Select whether to create a target point in the ROBODK
TOLERANCE_JOINTS_NEWTARGET = 10 # in degrees Determine the interval from the target point
ROBOT_IP = None # Robot IP, if it is None, you need to change the corresponding robot IP number in the Connect Robot option





