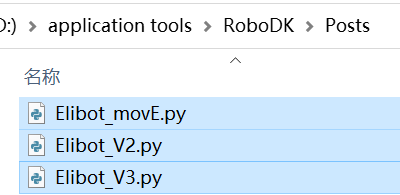
1. Copy and paste the Elibot_V2.py、Elibot_V3.py and Elibot_movE.py to the folder "Posts" under the RoboDK installation path.
(diffences will be explained in the last paragraphs)
2. Process the track and create program in RoboDK as needed.
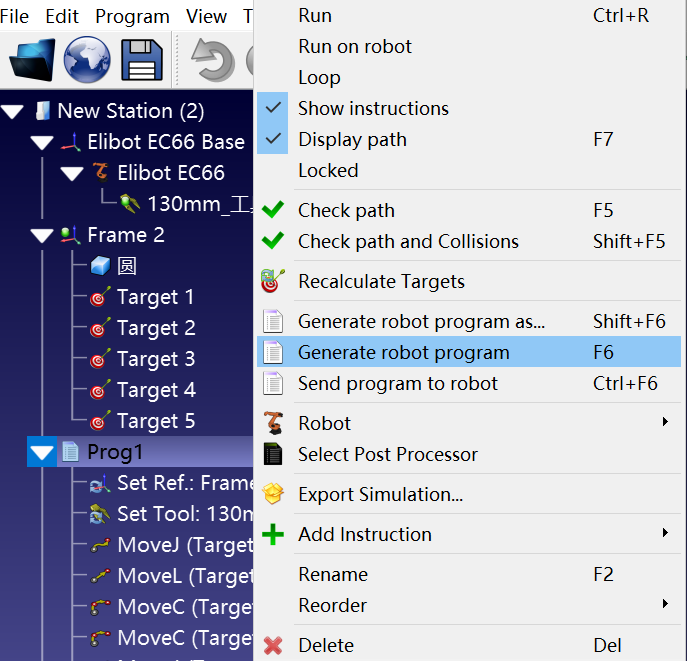
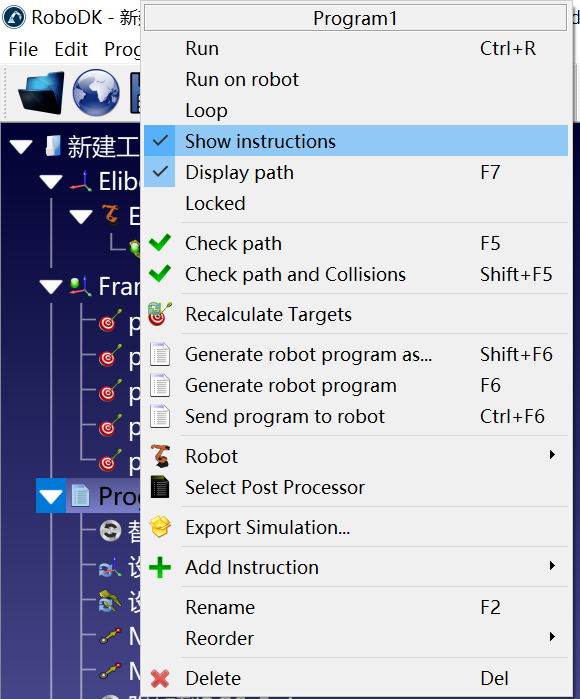
3. Right-click on the generated program, we can select to show the instructions.
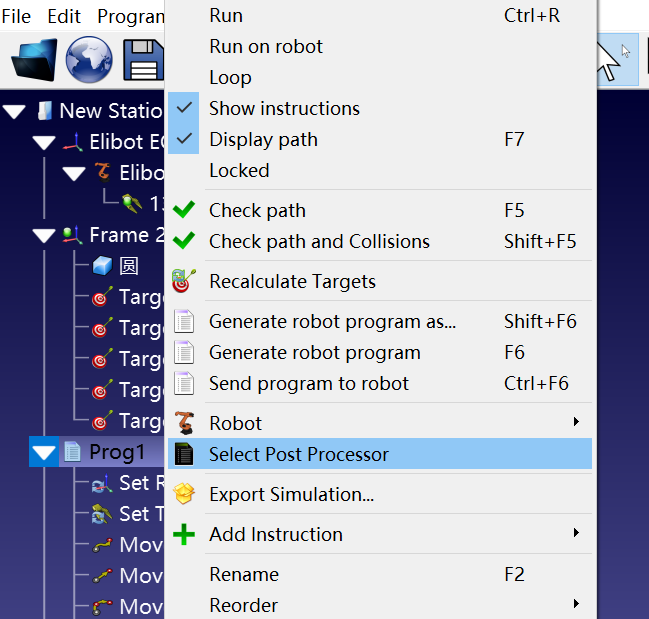
4. Right-click on the program, choose "Select Post Processor",
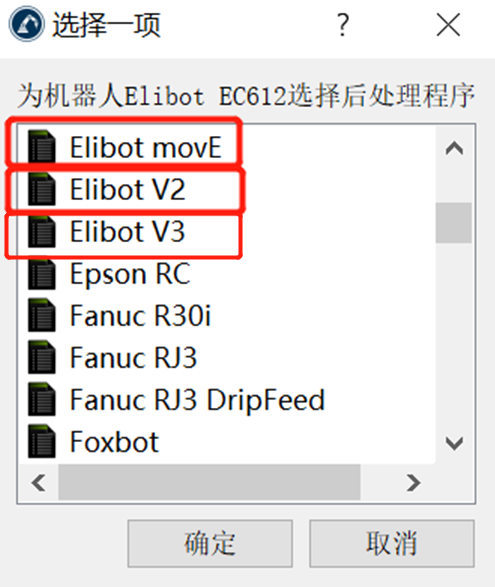
-Choosing Elibot_V2.py will generate SETJOINT and corresponding MOVJ Pxxx format, without coordinates. The first line of the program is automatically set to the corresponding tool. Copy and save as a JBI file and download to the robot. Please ensure the CR in first line and last line is 0.
--Choosing Elibot_V3.py will generate SETPOSE and corresponding MOVL Vxxx format,The first line of the program is to set the TOOL and user coordinate system content (it's adviced to use Elibot_V3.py in practical case, only need to modify the user coordinate), using tool1 and user1. You need to import the robodk_transfer_user.lua into the robot first. Copy and save as a JBI file and download to the robot. When running the program, robodk_transfer_user.lua will convert pose under user1 to pose under base.
-For robots above V3.5(which can use movE JBI instructions), users can use Elibot_MovE instead of V3. Elibot_MovE will no longer need the lua to convert points. The generated program use movE instructions directly(The movE instruction contains tool and user,MOVEJ use points under joint while MOVEL和MOVEC use points under cart),example:
SETPOSE V000 300,0,0,0.0,0.0,0.0
SETUSERFRAME USER #(1) V000
SETPOSE V000 0,0,130,0.0,0.0,0.0
SETTOOLFRAME TOOL#(1) V000
MOVEJ VJ=100% CR=5.0MM ConstP=[0.0, -87.918, 72.008, -74.089, 90.0, 0.0]
MOVEL V=200MM/S CR=5.0MM ACC=20 DEC=20 TOOL#(1) USER#(1) ConstV=[54,103.5,191,-3.14159,0.00000,-1.57079]
MOVEC V=200MM/S CR=5.0MM ACC=20 DEC=20 TOOL#(1) USER#(1) ConstV=[114,183.5,191,3.14159,-0.00000,-1.57079] ConstV=[184,93.5,191,3.14159,-0.00000,-1.57079]
MOVEC V=200MM/S CR=5.0MM ACC=20 DEC=20 TOOL#(1) USER#(1) ConstV=[114,23.5,191,3.14159,-0.00000,-1.57079] ConstV=[54,103.5,191,-3.14159,0.00000,-1.57079]
MOVEL V=200MM/S CR=5.0MM ACC=20 DEC=20 TOOL#(1) USER#(1) ConstV=[54,103.5,261,3.14159,-0.00000,-1.57079]
5.Right-click on the program, choose "Generate robot program", download the script to the real robot and run the program.