EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
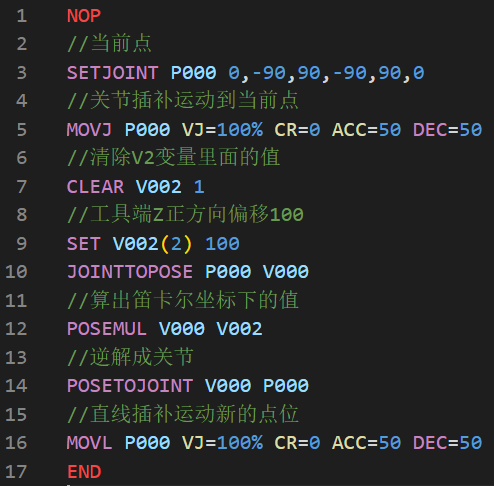
例如:abb指令:MoveL RelTool (p0, 0, 0, 100), v100, fine, tool1;沿工具的z方向,将机械臂移动至距p0达100 mm的一处位置。
回答: