
1. 生成*.script
2. 生成*.task
1. 将Elibot_CS_V1.py 放到robodk安装目录的Posts文件夹下,默认路径为C:\RoboDK\Posts
2. 在robodk中,导入与真机一致的CS模型,编辑程序完成后右键点击程序,选择“后处理程序”为Elibot_CS_V1
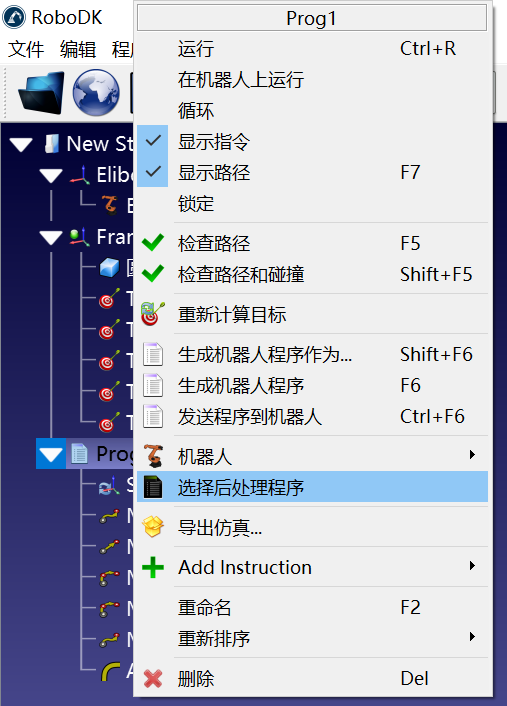

3. 选择"生成机器人程序"

4. 注意检查生成的程序中若有类似//开头的注释,请手动将其删除

5. 复制脚本到CS机器人运行
若机器人点位在CS的脚本中,将难以直接通过示教调整该点位。CS机器人界面程序主要为*.task,CS在界面上,可以方便的调整task中的固定点(直接移动/重新记录点),本节主要介绍如何将RoboDK中的轨迹导出为task,其中包括基坐标系下和用户坐标系下。
注意:只支持MoveJ和MoveL,不支持MoveC!!!
将附件的Elibot_CS_TASK 和Elibot_CS_TASK_Frame放入ROBODK的安装路径下的Posts(默认C:\RoboDK\Posts)
在robodk中,导入与真机一致的CS模型,编辑程序完成后右键点击程序,选择“后处理程序”,再点击“生成机器人程序”

3. 将生成的*.task文件拷贝到CS机器人的program文件夹,并加载任务
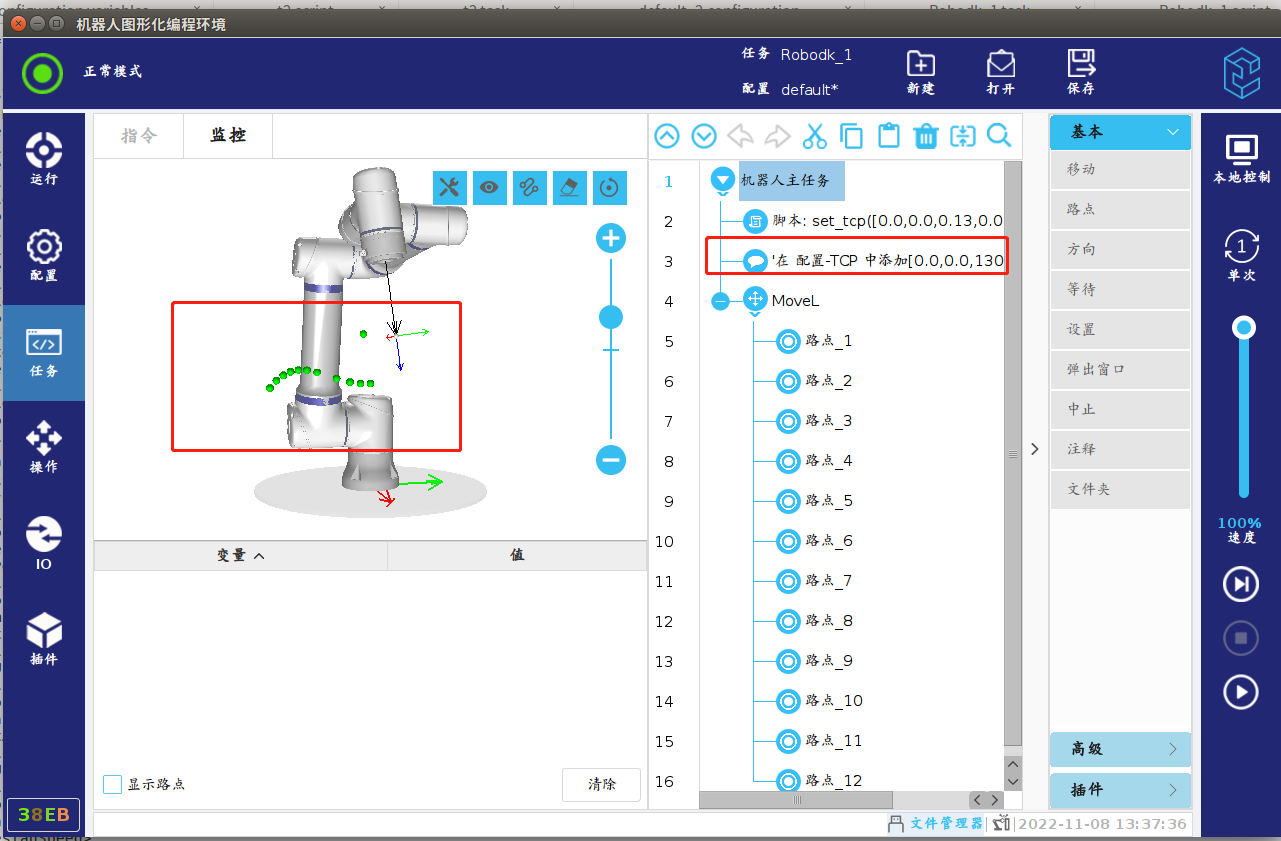
4. Elibot_CS_TASK生成的点已经全部转化到机器人base下。CS界面上可以显示在base下的点
5. 注:在程序第一行已经添加set_tcp指令,目前CS界面的MoveL/MoveJ指令转化为脚本时,每一句都会重新自动添加set_tcp(即把当前激活的tcp数据重新应用到程序中,会覆盖第一行的脚本 set_tcp)
6. 强烈建议:参照第二行的注释,在配置-TCP中 新建tcp,数据按照注释中的数据填入并激活 !!!!
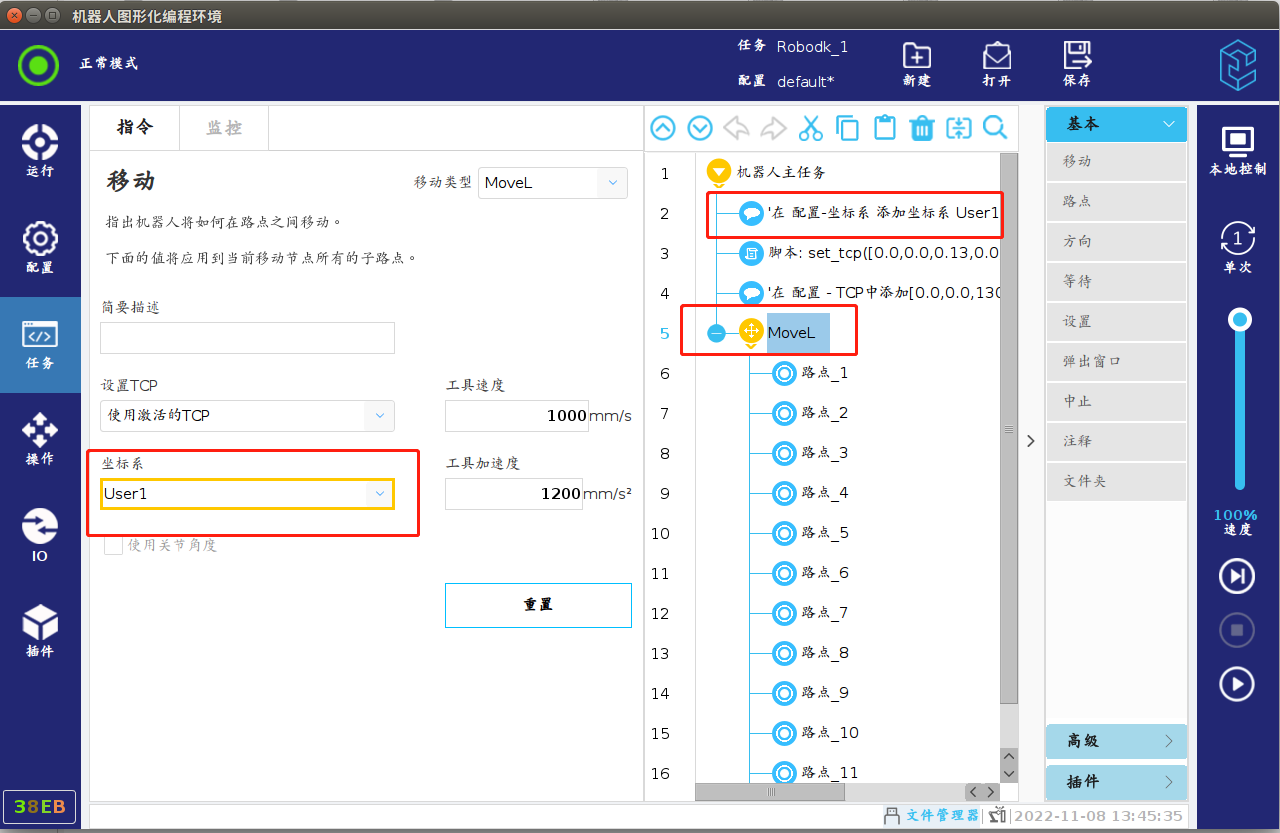
7. Elibot_CS_TASK_Frame生成的点已经基于RoboDK中的用户坐标系User1(用户直接调整坐标系,即可实现离线与实际产品坐标系的差异调整)
8. 注:由于用户坐标系数据存在Configuration文件夹内,故第一次导入task会出现下图报错。请根据第一行注释提示,在配置-坐标系中 新建坐标系,名字为User1 (注意大小写),数据按照注释中的数据填入 !!!!
9.此时可以运行机器人程序。若需要整体偏移点位,修正坐标系User1即可
Tips: 如需获取CS机器人相关RoboDK文件,请联系Elite官方技术支持邮箱:tech@elibot.cn
或通过百度云:链接:https://pan.baidu.com/s/1oT70A_RbTYbkTkPttUqYsA 提取码:l47f





