
1.1机器人作为modbus通讯主站
1.2机器人作为modbus通讯从站
2. 通讯失败原因排查
Elite CS 系列支持通过标准的 Modbus TCP 协议获取或者修改机器人的内部数据。其既可作为主
站,访问其它支持 Modbus 协议的从站设备;也可作为从站,接受其它 Modbus 主站的访问请求,他的默认端口是(502)。本节主要阐述其作为主站时具有的一些特性。
MODBUS主站协议配置:
打开cs机器人示教器--打开电源--释放抱闸--使机器人处于正常状态。

(未打开电源状态)
(正常状态)

2. 输入从站地址IP--读取或写入的寄存器地址--读取或写入的寄存器类型---添加新信号(在同个IP地址下,添加新的信号)。

(图片以CS机器人作为服务器举例)
3. 配置完成后即可写入或读取从站从站地址的数据。
CS机器人做从站的配置方法。示例以Modbus Poll作为主站。
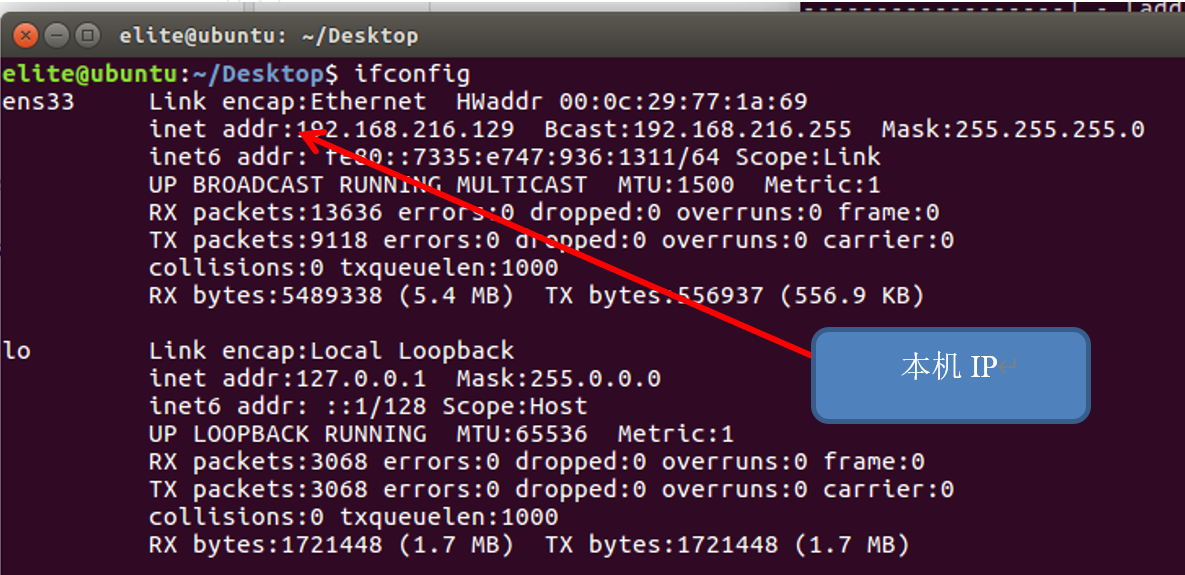
1. 在CS虚拟机内新开一个窗口,输入 ifconfig,查看本机IP。
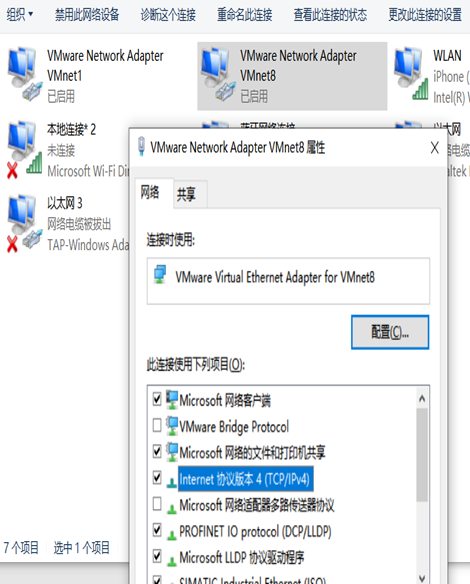
2. 修改电脑端IP地址,使其与虚拟机的IP地址在同一网段。

3. 打开Modbus Poll,选择Modbus TCP/IP,并配置IP地址与端口,图示IP地址:192.168.216.129;端口:502。

4. 读取写入线圈的值。

(Modbus Poll端配置)
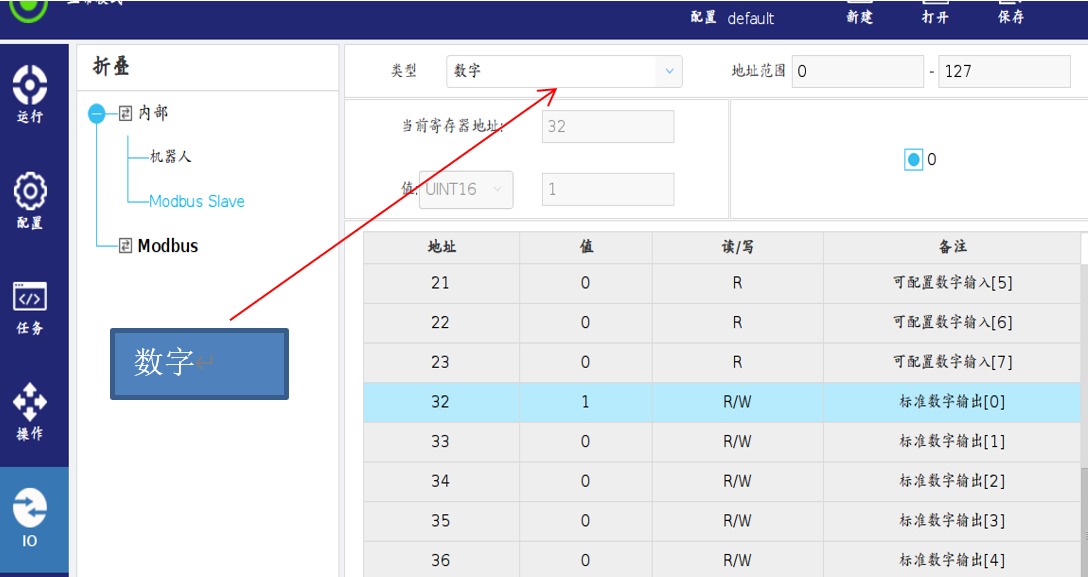
(CS机器人端配置)
5. 读取或写入寄存器的值。
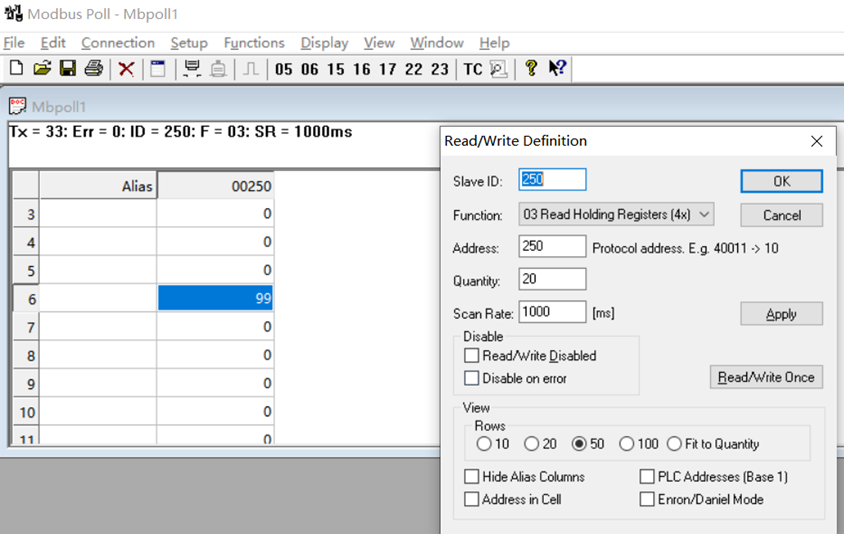
( Modbus Poll端配置)

(CS机器人端配置)
6. CS机器人通过Modbus读取内部寄存的值。
配置内部IP地址:127.0.0.1。
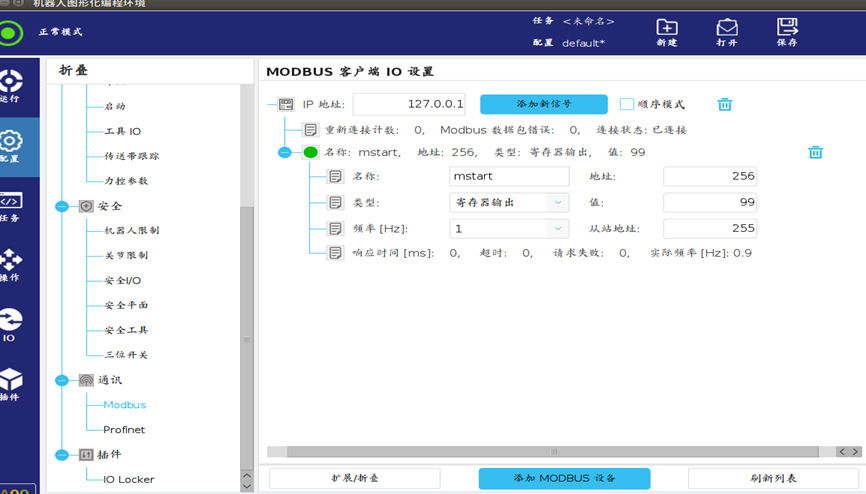
(图示解释:读取内部寄存器地址256的值,并把值赋给mstart的变量,即mstart=99)

作者:孟峰立





