
路径:在任务-基本-移动中可选择不同的移动方式。具体参数可在左侧“指令”栏设置。
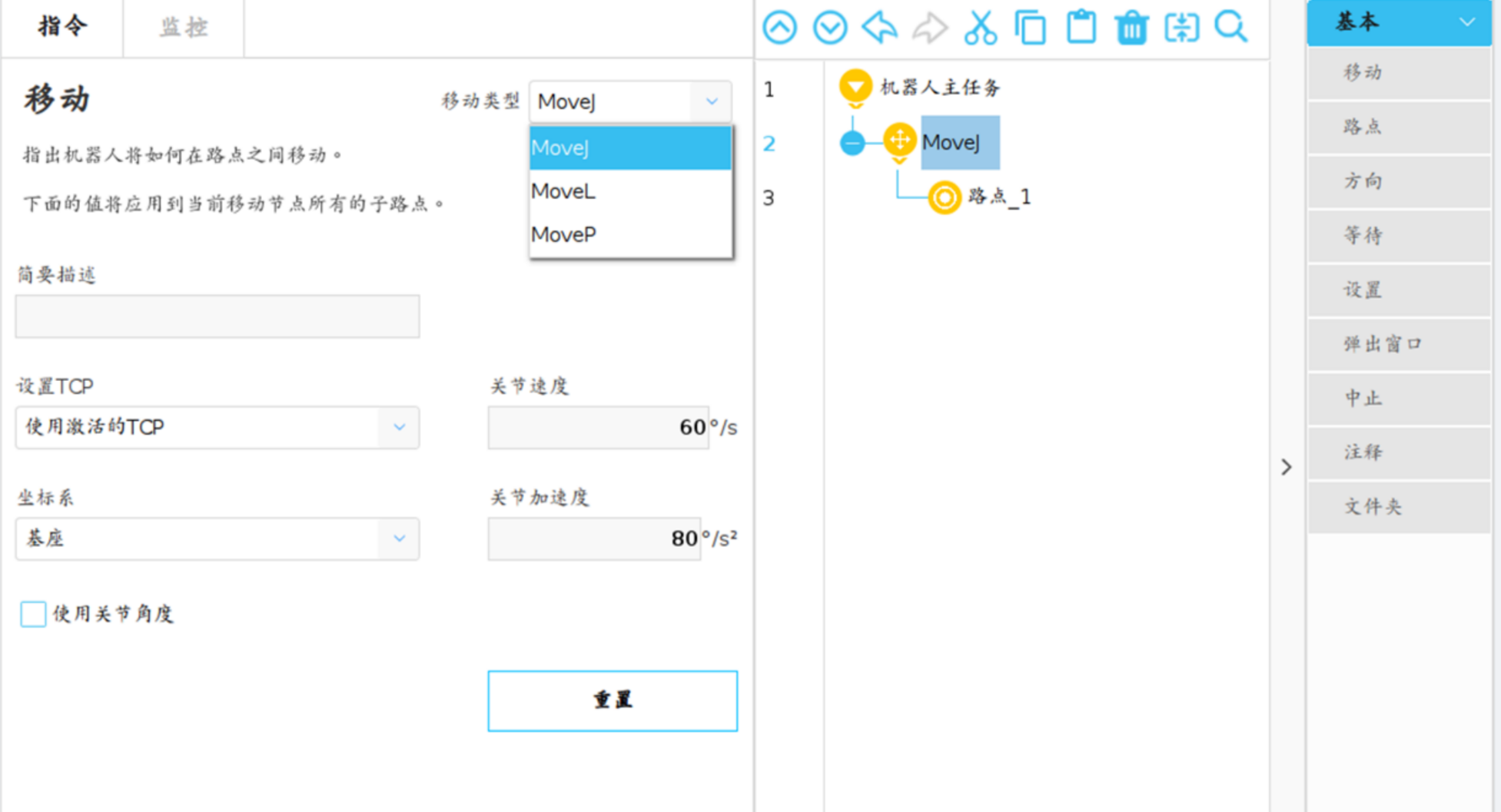
【MoveJ】关节运动
【MoveL】直线运动
【MoveP】工艺运动:可以使TCP以恒定速度进行移动。默认情况下,所有路点使用相同的转接半径 25mm。统一更改转接半径可点击“MoveP”在左侧修改。
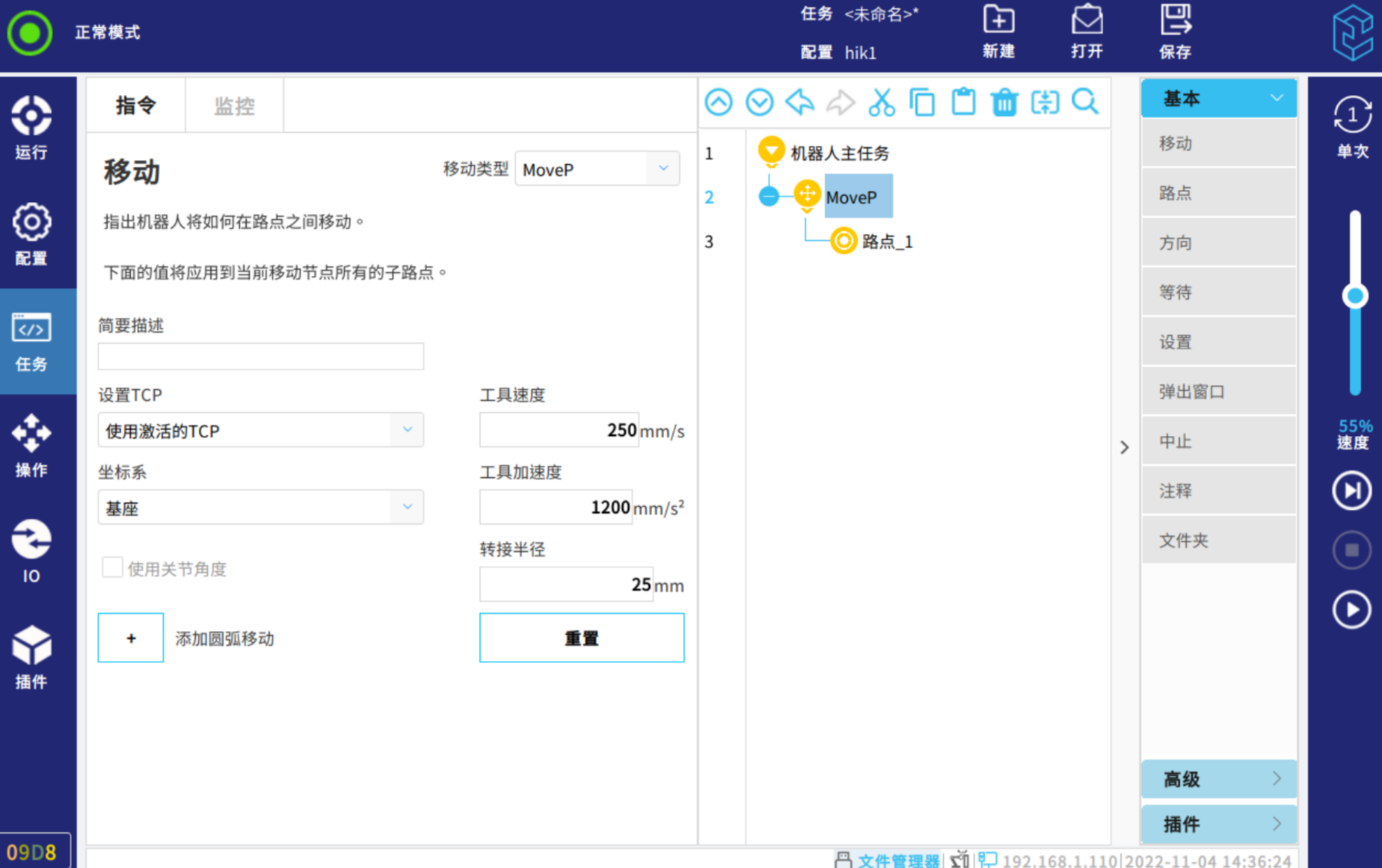
如要进行圆弧运动,则点击“MoveP”在左侧选择“添加圆弧移动”,需示教经过点和终点,由MoveP下的路点
1、经过点和终点(可改名)构成一段圆弧。

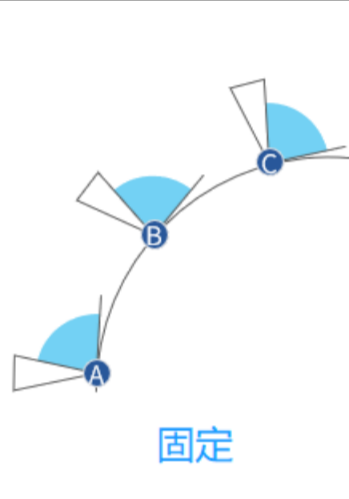
注意:点击任务中“圆弧运动”,可以对圆弧运动中的机器人末端姿态进行设置:
固定:保持起点的机器人末端相对于路径的姿态直到圆弧运动结束。
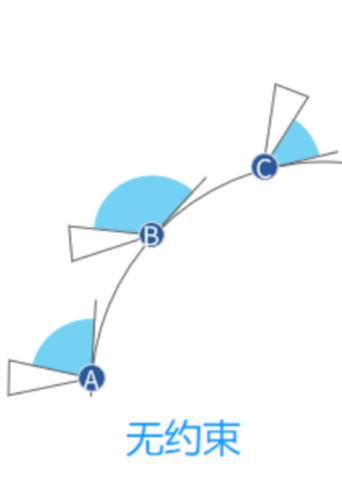
无约束:从起点的机器人末端相对于路径的姿态逐渐过渡到终点相对于路径的姿态。
效果参考:
固定:
https://aliyun-oss-img-bed.oss-cn-hangzhou.aliyuncs.com/elite_imgbed202211101721192.gif
无约束:
https://aliyun-oss-img-bed.oss-cn-hangzhou.aliyuncs.com/elite_imgbed202211101719932.gif






