
RoboDK を使用してシミュレーション プログラムを編集し、それを EC ロボットに送信してメソッドを実行できます。
まずECシリーズのロボットモデルをインポートし、「地球」アイコンをクリックしてRoboDk公式ウェブサイトのロボットライブラリを開き、Elibotを見つけて「open」をクリックします。
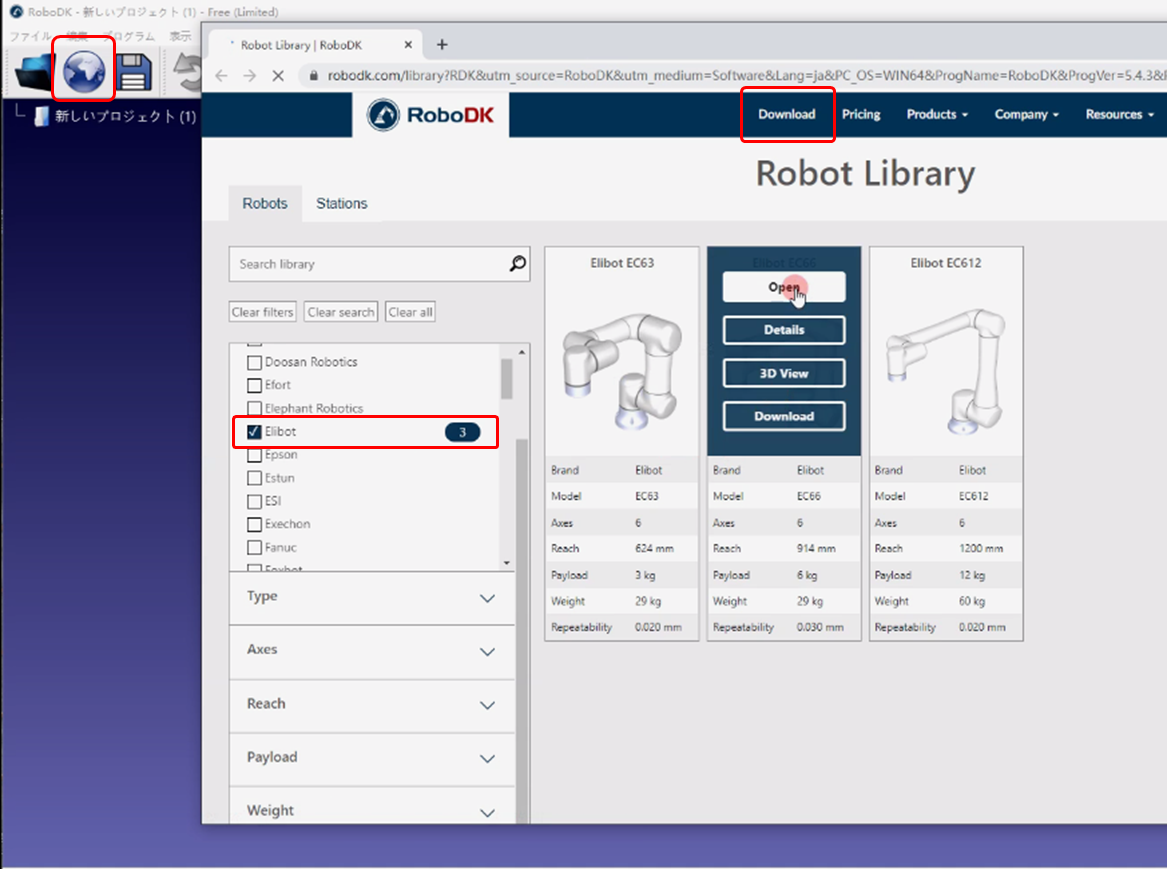
ECシリーズのロボットモデルがRoboDKに自動的にインポートされます

適切な座標を選択してロボットを動かしてポイントを設定します(ドラッグ或は座標値を変更)。

「ターゲット」のアイコンをクリックして点の位置を記録する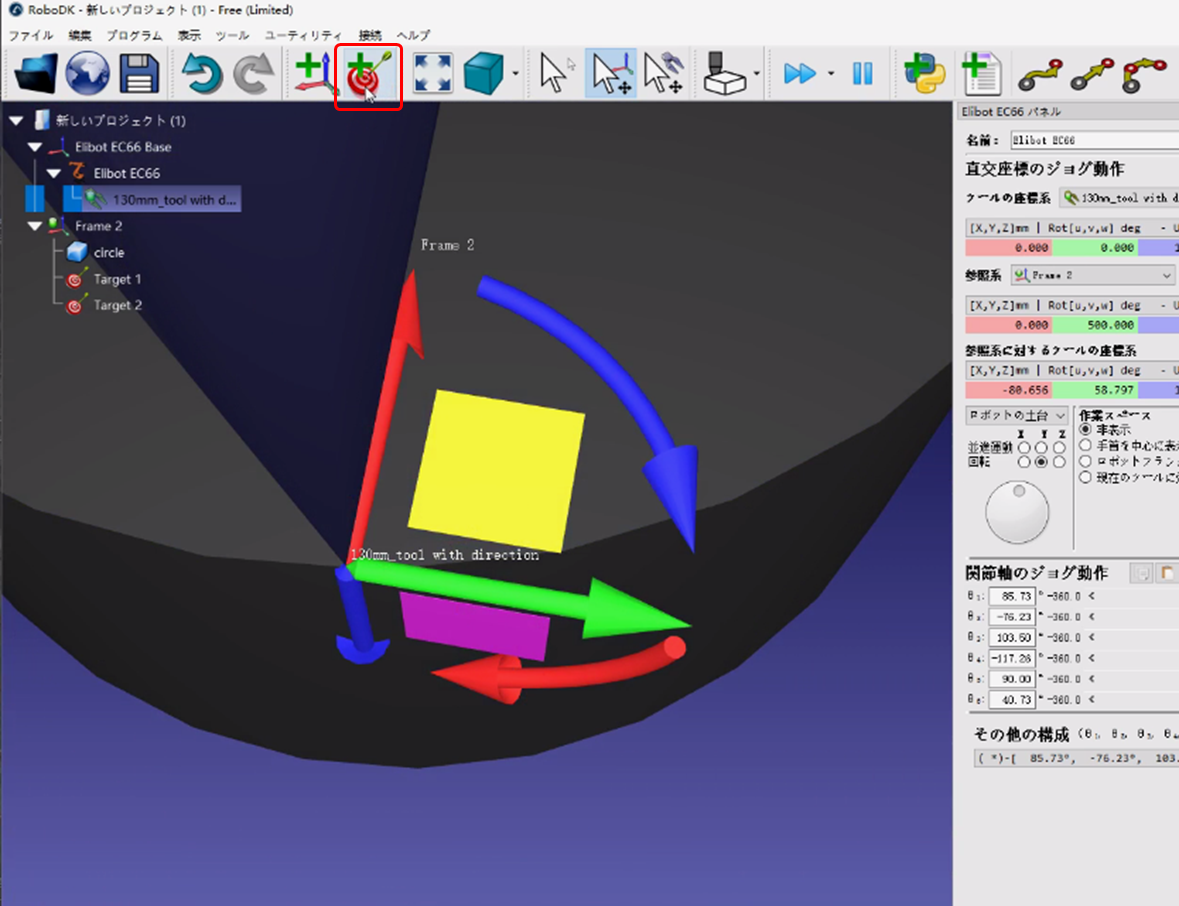
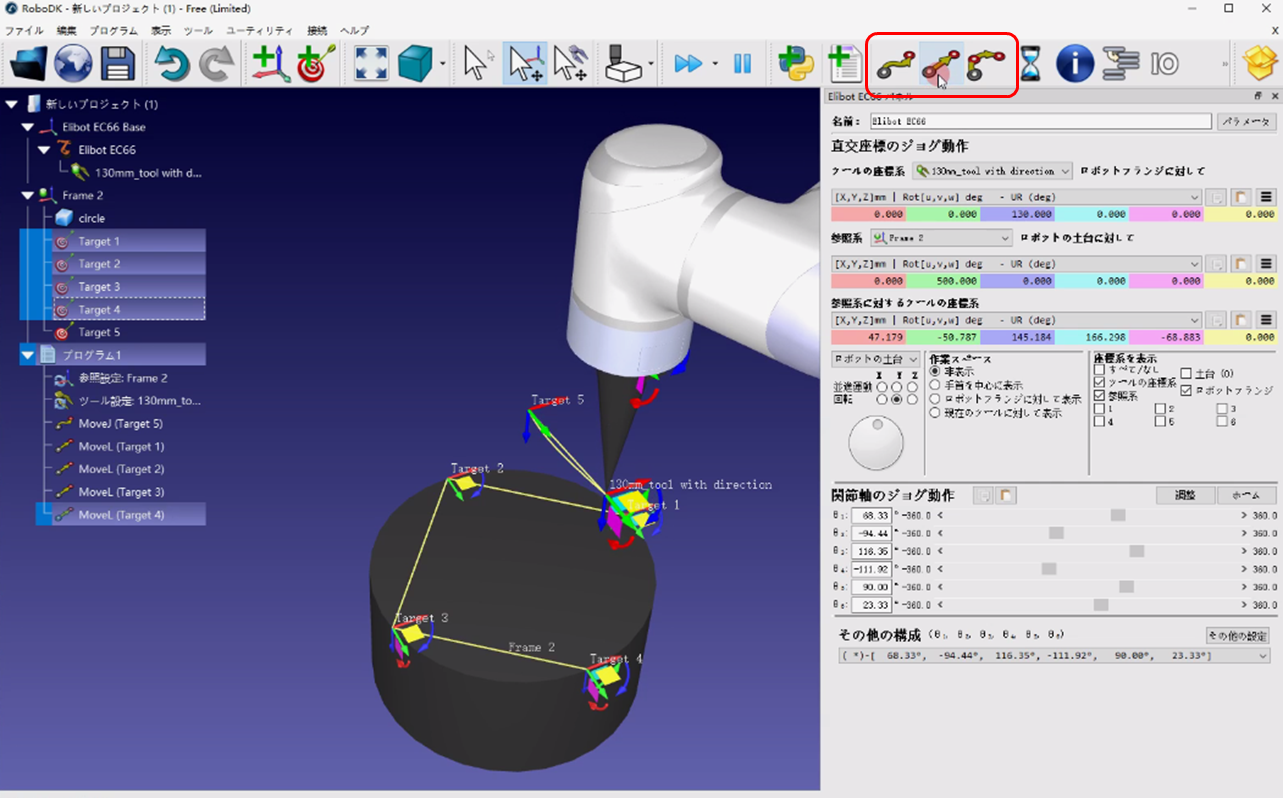
メニューバーの MoveJ、MoveL、MoveC をクリックしてパスを計画します。
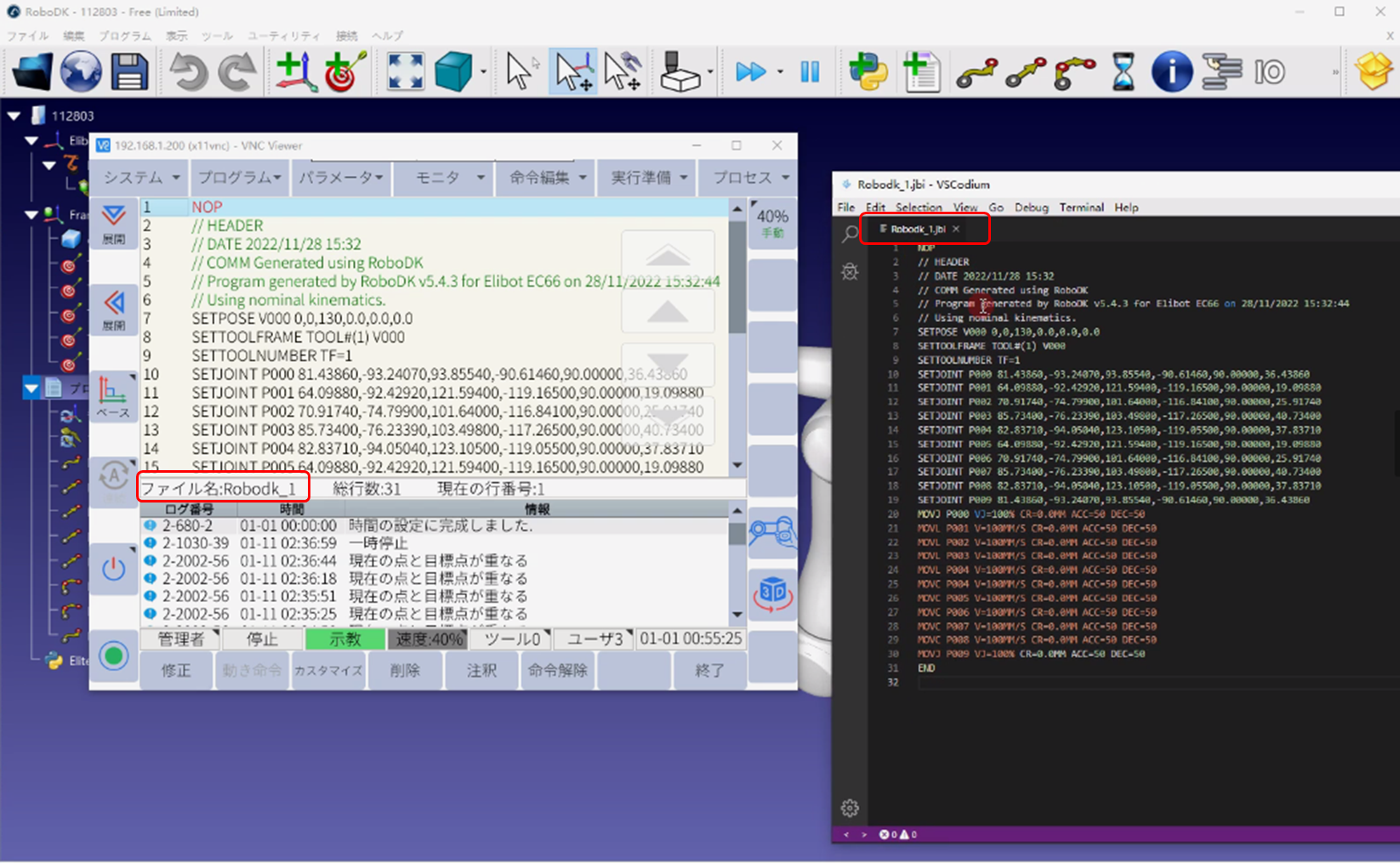
例で Elibot V2 が選択されている場合は、対応する JBI で SETJOINT コマンドを使用してポイント位置を設定する (Elibot V2: SETJOINT、Elibot V3: SETPOSE)。

VSCodium は自動的に開き、[File]から直接保存するか、[Edit] からファイルを編集もできる。

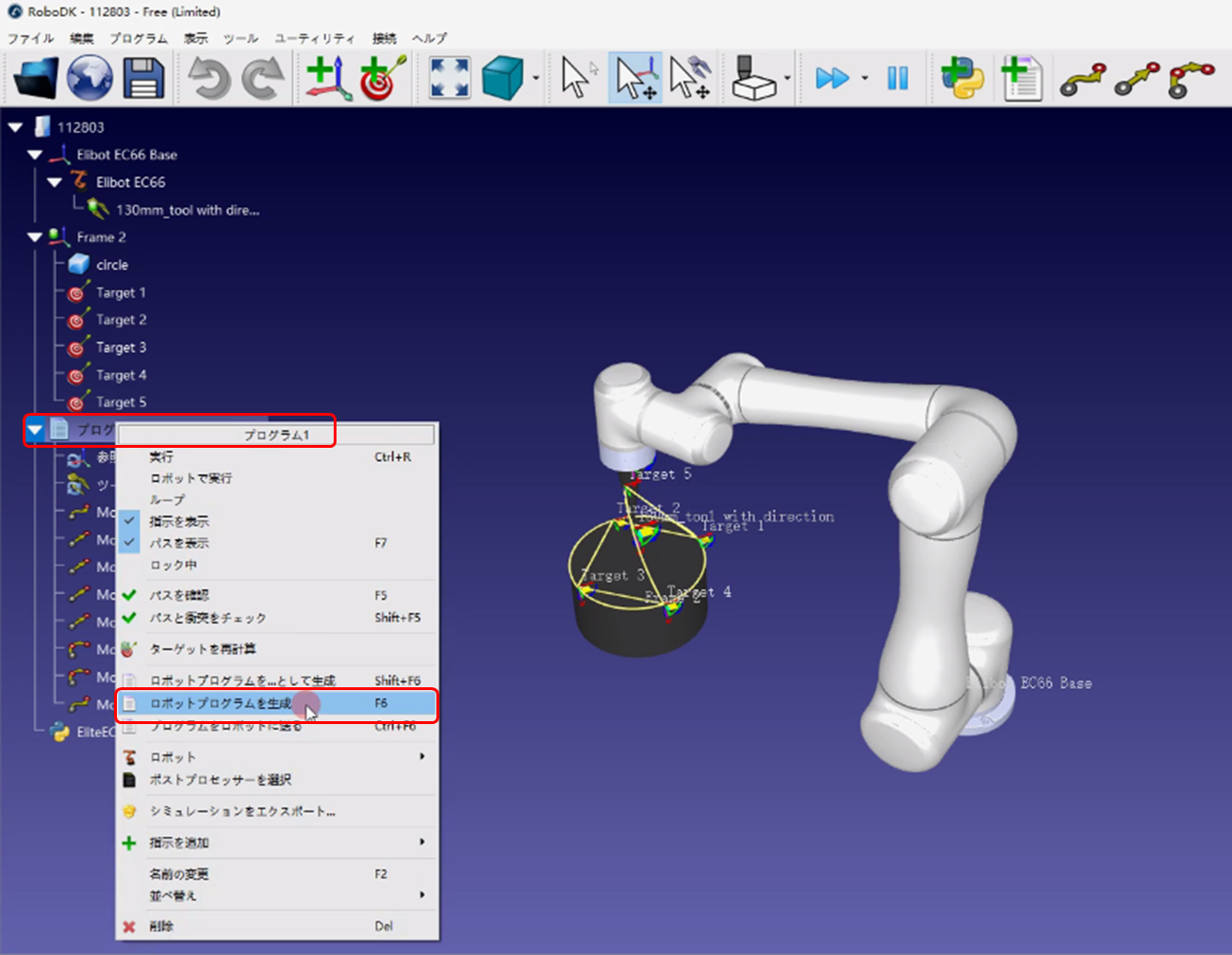
(「プログラム」をクリックし、「プログラムをロボットに送る」を選択して)
ロボットがプログラムを送信する前に、ロボットと通信する必要がある。手順は次の通りです:
①メニューバーで「接続」をクリックして、「ロボットを接続」をタップする。
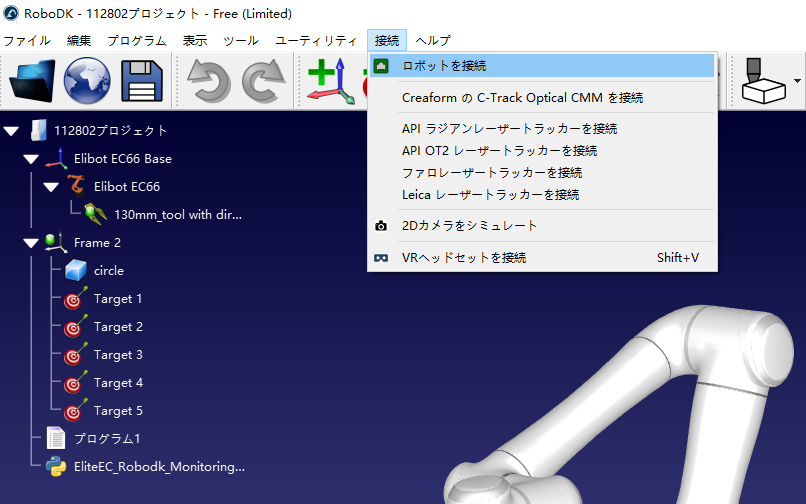
②それからロボットのIPとロボットのポート(8056)を入力する。





