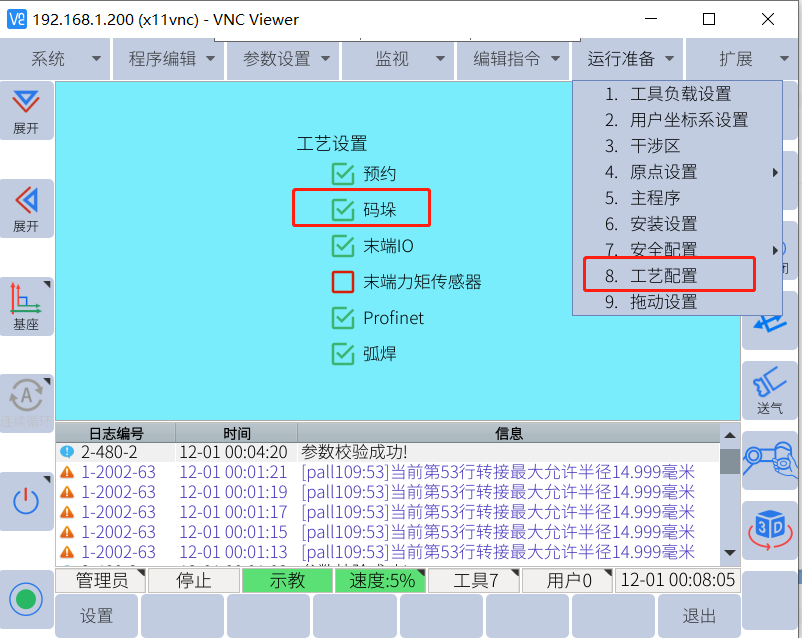
EC机器人自带码垛工艺,需要进入“工艺设置”,勾选“码垛”。关于 码垛包及使用手册,可以进入elite机器人下载中心(https://www.elibot.cn/#/download),搜索 EC_码垛说明书_VER3.3.2 并下载。

EC机器人在配置完垛型后,可以生成码垛模板程序,程序根据实际需要进行相应修改。程序中相关变量示意如下图:

对于以下这种单层垛型不规律,奇偶排列,若直接使用示教器中的设置/示教功能,非常不方便。 用户可以使用配套的 码垛助手.exe软件,在PC上图形化配置图形,并生成相应cfg文件导入机器人,重启即可完成下图这种复杂垛型配置。
码垛助手获取和使用方法如下:链接:https://pan.baidu.com/s/15o_PpsQD3nT-sw5FUNVmKw 提取码:uidk

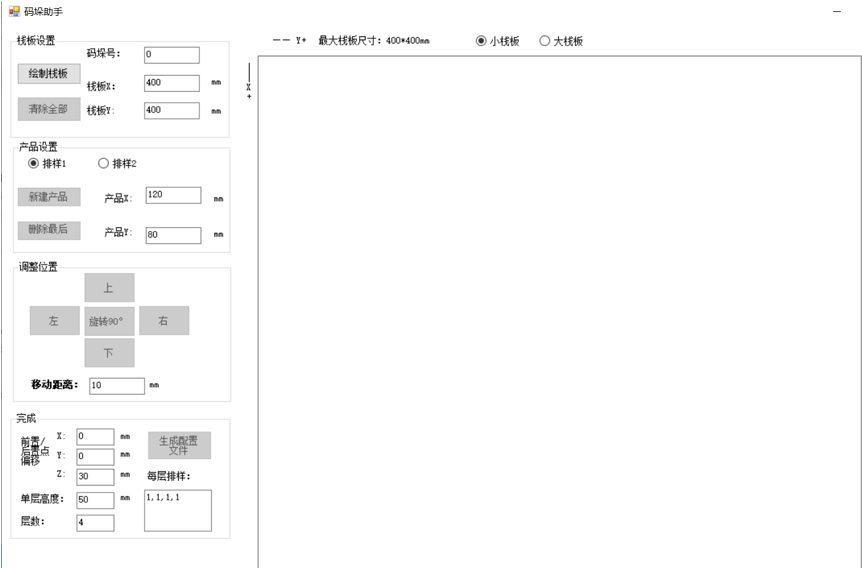
1. 双击码垛助手.exe
2. 栈板最大支持1200*1200,如果超过400*400,选择“大栈板“
3. 根据需要,设置栈板大小,并点击 绘制栈板。
4. 码垛号对应实际使用的码垛号,默认为0,配置文件中的number为0,默认生成的文件为pallet0.cfg(如果填1,配置文件中的number为1,默认生成的文件为pallet1.cfg)
配置文件默认使用user0坐标系进行计算!!
5. 默认选择排样1(一个码垛最多支持2种排样)
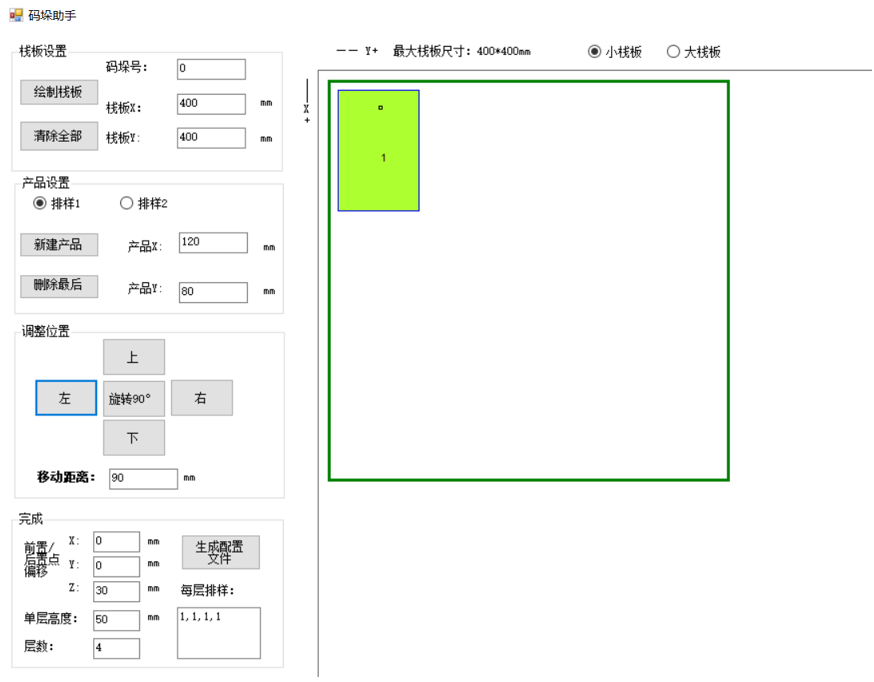
6. 输入产品x和y方向的尺寸(注意下图为实际机器人base坐标系方向),并点击“新建产品“,此时会根据设置的数据新生成一个产品。产品上的标识为产品方向,可以点击”旋转90°“按钮,产品会依次旋转90°。

7 再次点击“新建产品”,会再上一个产品位置新建一个产品。根据需要设置移动距离,并移动产品,如下图
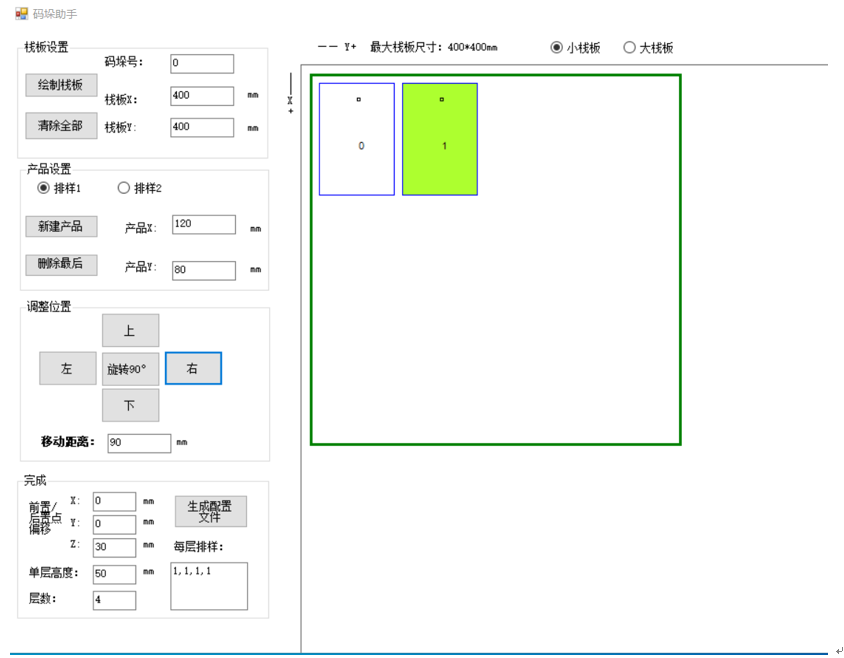
8. 选中的产品,呈现 黄绿色。
9. 根据需要,依次添加产品(默认新建的位置是当前选中产品的位置,移动前根据需要设置移动距离(建议移动距离比产品的x和y大10mm)
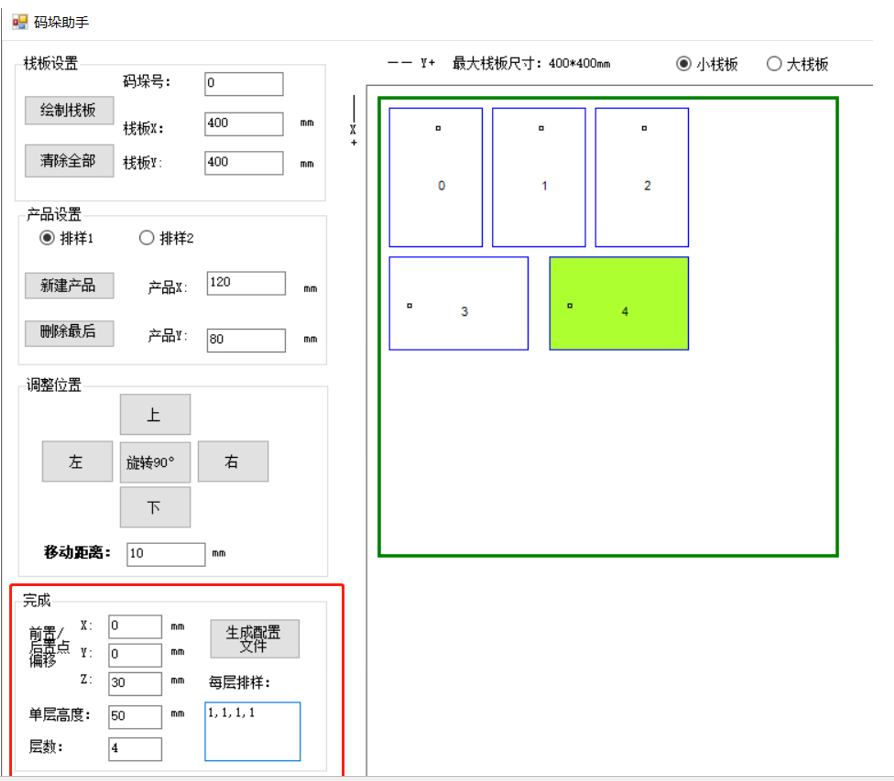
10. 如果只有一种排样,在左下角设置基于每个码垛点的前置/后置偏移数据,单层高度和层数。每层排样均使用排样1,所以输入数据为1,1,1,1(共4层),点击“生成配置文件”。直接进入第12步。
11. 如果有2种排样,点击“排样2”,进行设置。设置过程中可以来回切换 排样1和排样2,检查产品位置。(如果使用2种排样,在左下角的每层排样,根据实际修改,例如奇偶交替1,2,1,2)

12. 将配置文件通过ftp传输到机器人控制器的rbctrl文件夹下(参考https://bbs.elibot.cn/forum/detail/topic/42.html 进行上传和下载文件),重启机器人控制器!!!
13. 进入示教器 码垛工艺包设置界面,可以看到刚刚导入的配置文件已经生效。根据需要 对第一个码垛点和第一层的过渡点(程序中可以不使用)进行示教。

14. 下一步,自定义排样中,可以看到前面的设置数据。

15. 下一步,可以看到每一层基于第一层的高度偏差。如果机器人使用 升降柱,则可以在特定需要升降的那一层,根据升降机动作高度修改对应该层码垛相对于第一层码垛的高度~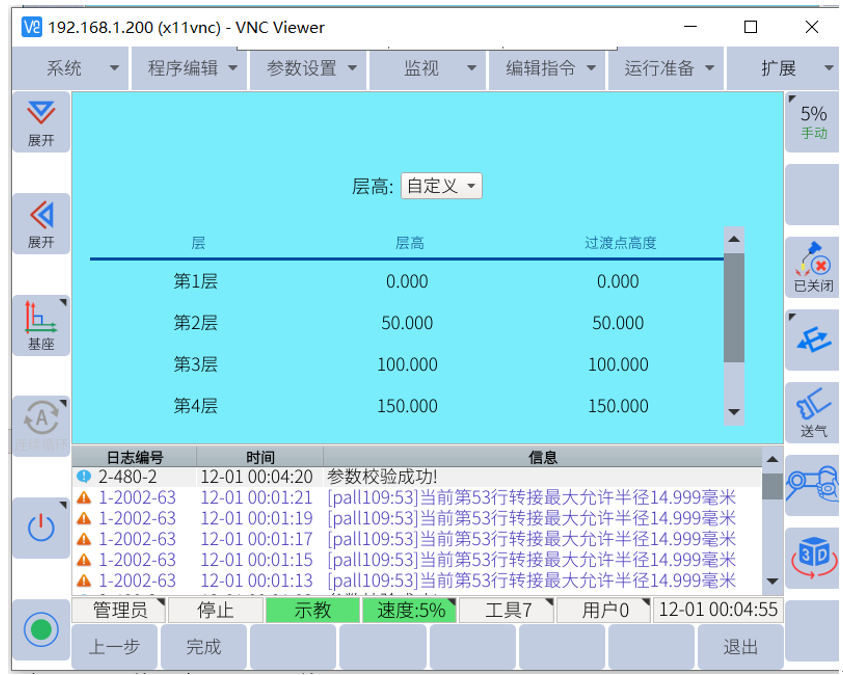
点击“完成”,机器人会检查所有点的可达性。若检查无误后,可以点击生成码垛程序模板,并根据实际修改模板程序并使用。
注意:检查码垛参数后,对应的I90会设置为当前码垛的总个数。根据实际需要,在程序中或者直接修改I90(即当前从第几个开始码垛)。
以下代码中的JUMP *AGAIN IF I90< XX, XX修改为实际码垛总个数+1







