1. 艾利特机器人支持ModbusTCP通讯,并在相应寄存器默认提供了包括机器人轴角度,笛卡尔坐标等数据。具体寄存器定义参见https://www.elibot.cn/download/technique?category&series=1&keyword&page_index=5 中的EC_SDK_Socket手册_Ver3.9.2
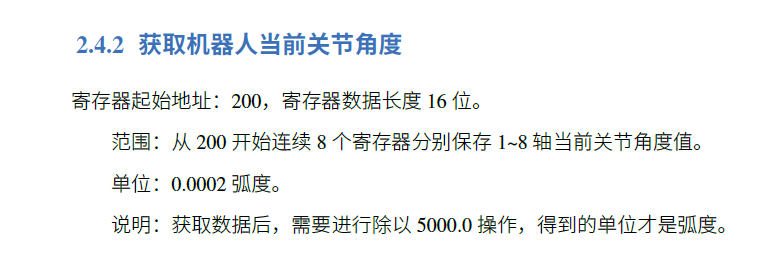
2. 例如手册描述,寄存器200开始的6个寄存器,实时输出当前机器人关节角度,输出为带符号INT型,主要单位换算
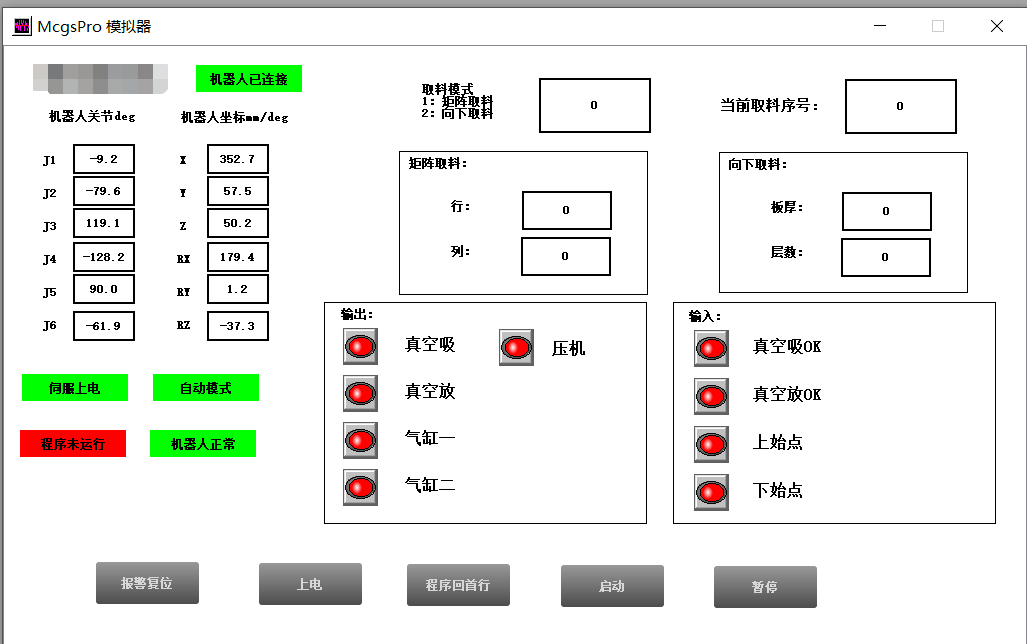
3. 可以下载昆仑通态MCGS Pro配置软件,选择1071Gt触摸屏,在电脑本地模拟。
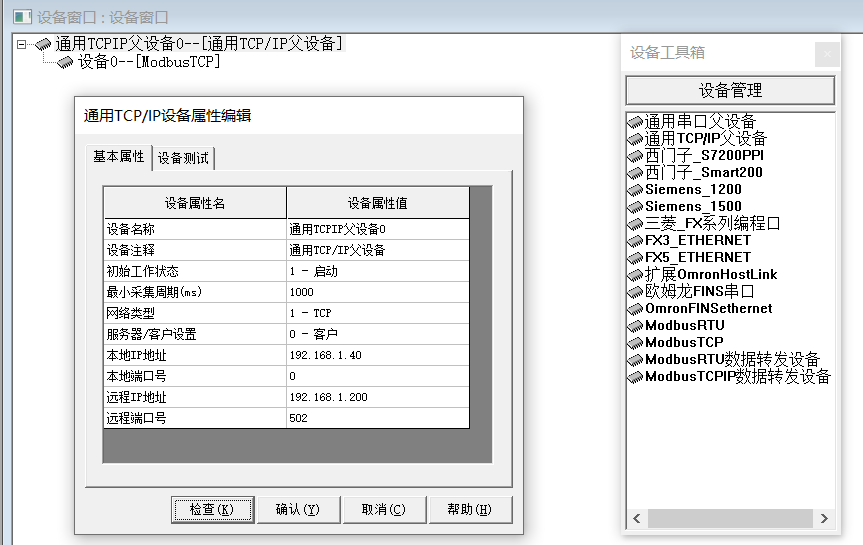
4. 在设备窗口添加TCPIP父设备,设置机器人的IP地址,同时设备0添加ModbusTCP
5. 添加设备通道,例如要读取机器人寄存器200的J1位置,设置如下(注:昆仑通态的寄存器地址从1开始,即此处填写201对应机器人的200地址),并关联到变量J1上。
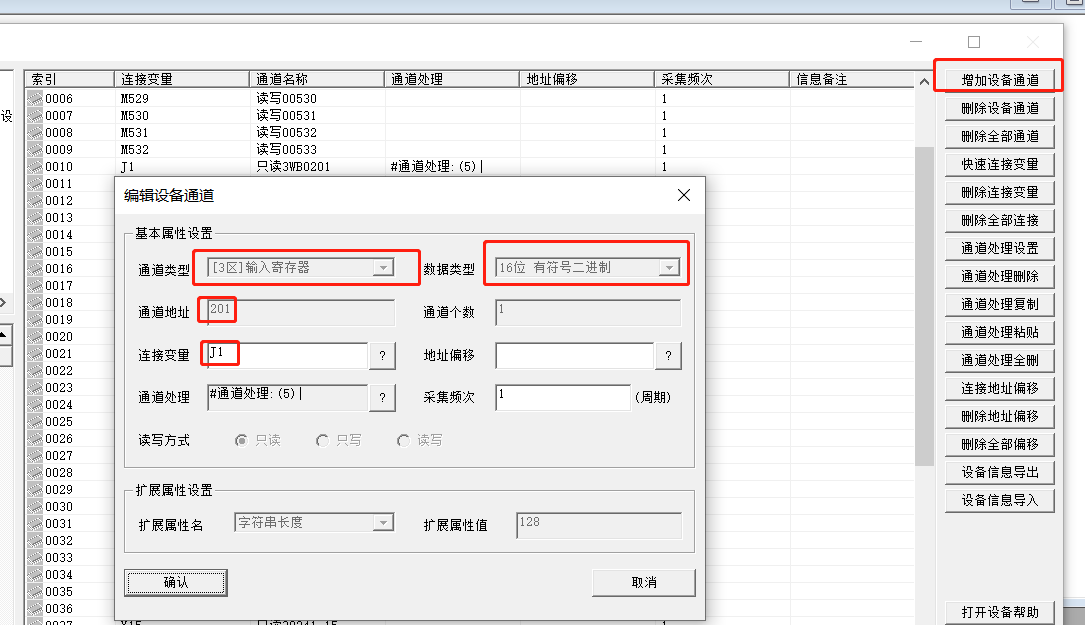
6. 根据前文描述的输出寄存器数据与实际角度关系,创建通道处理,选择工程转换,并设置对应的输入最大最小值和工程最大最小值。
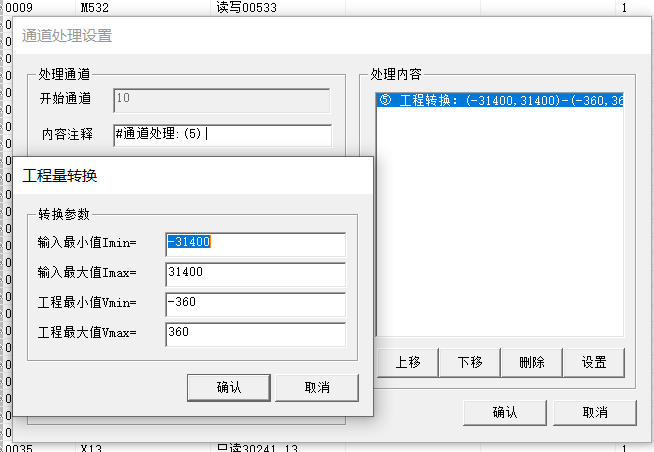
7. 其余关节和笛卡尔坐标设置类似
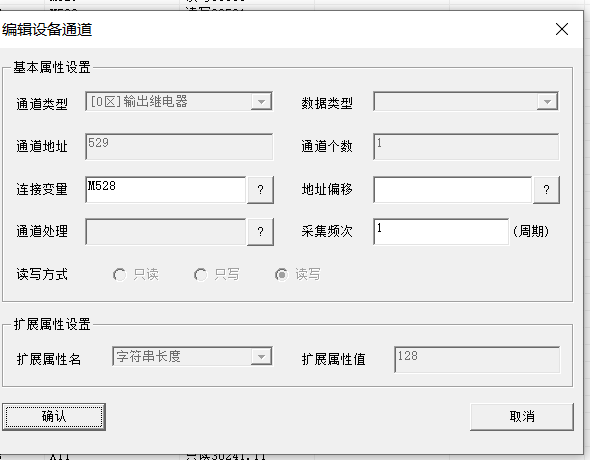
8. 要对例如寄存器M528读写,可以如下设置(注意昆仑通态对应地址+1)
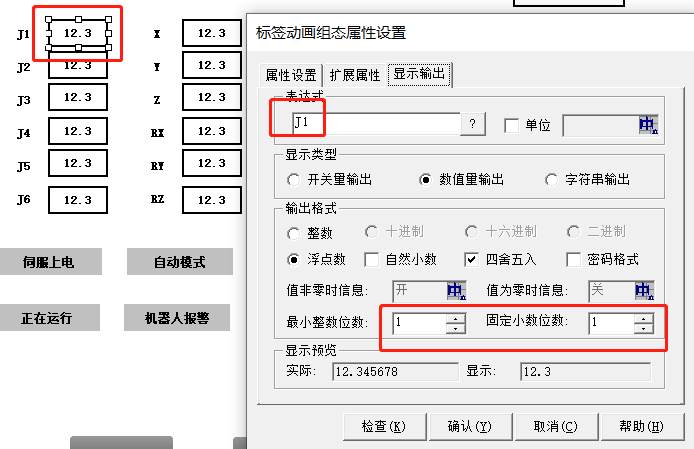
9. 在组态窗口,插入一个label,并右击设置属性,将表达式关联到之前创建的变量J1上
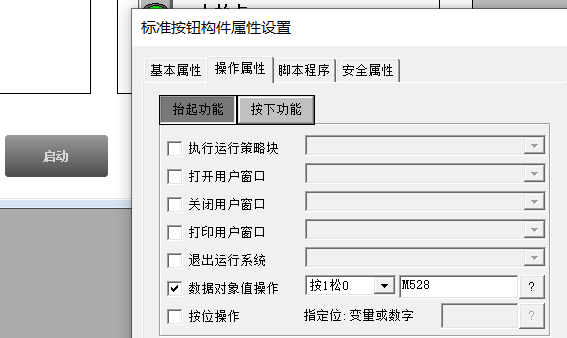
10. 对于m528的写入,可以创建一个按钮,并右击设置属性如下