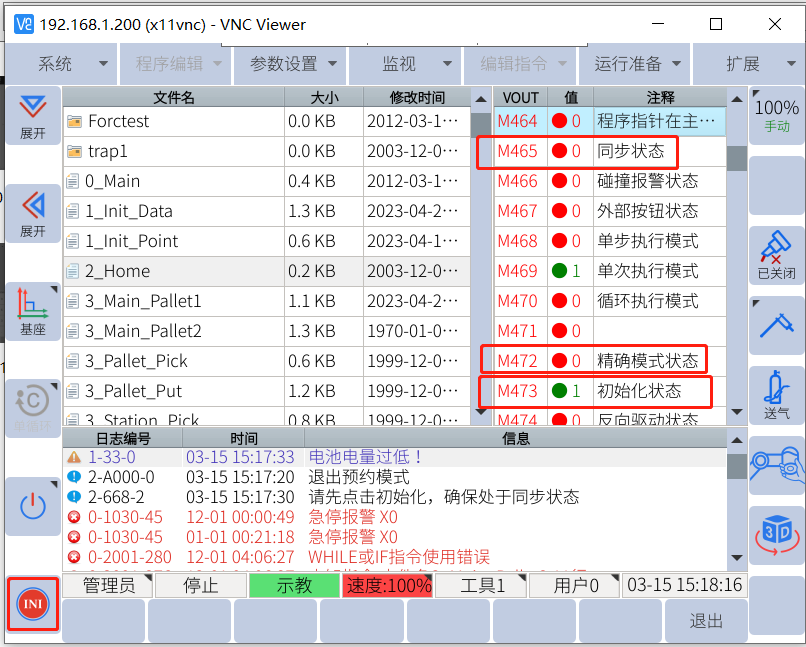
EC机器人处于remote模式,开机后,机器人状态如下
机器人需要完成以下动作,进入正常模式:
1. 机器人开机处于初始化状态(通过虚拟输出m473判断,1表示处于初始化状态,0表示完成初始化状态),需要使用clearAlarm指令对机器人清错和打开抱闸。机器人抱闸打开情况可以通过get_servo_brake_off_status函数判断
2.获取机器人同步状态getMotorStatus,若未同步执行同步指令syncMotorStatus
3.给机器人上使能set_servo_status
4.判断机器人是否处于精确模式(通过虚拟输出m472判断,0表示未校准模式,1表示精确模式),若未校准,执行校准操作calibrate_encoder_zero_position,并等待机器人达到m472=1的精确模式
import socket
import json
import time
# v1.2
def connectETController(ip, port=8055):
sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
try:
sock.connect((ip, port))
return (True, sock)
except Exception as e:
sock.close()
return (False,)
def disconnectETController(sock):
if (sock):
sock.close()
sock = None
else:
sock = None
def sendCMD(sock, cmd, params=None, id=1):
if (not params):
params = []
else:
params = json.dumps(params)
sendStr = "{{\"method\":\"{0}\",\"params\":{1},\"jsonrpc\":\"2.0\",\"id\":{2}}}".format(cmd, params, id) + "\n"
try:
sock.sendall(bytes(sendStr, "utf-8"))
ret = sock.recv(1024)
jdata = json.loads(str(ret, "utf-8"))
if ("result" in jdata.keys()):
return (True, json.loads(jdata["result"]), jdata["id"])
elif ("error" in jdata.keys()):
print(sock.error["code"])
print(sock.error["message"])
return (False, json.loads(jdata["error"]), jdata["id"])
else:
return (False, None, None)
except Exception as e:
return (False, None, None)
def WaitBrakeOpen():
brakeopen = [0,0,0,0,0,0]
#获取伺服抱闸打开情况
suc, brakeopen, id = sendCMD(sock, "get_servo_brake_off_status")
b_sum = 0
# brakeopen为6个轴 抱闸打开情况,打开为1,不然为0,全部打开为[1,1,1,1,1,1]
for d in brakeopen:
b_sum = b_sum+d
while b_sum !=6 :
#获取伺服抱闸打开情况
suc, brakeopen, id = sendCMD(sock, "get_servo_brake_off_status")
b_sum = 0
for d in brakeopen:
b_sum = b_sum+ d
time.sleep(0.1)
# 等待6个轴全部打开
if __name__ == "__main__":
robot_ip = "192.168.1.200"
conSuc, sock = connectETController(robot_ip)
suc, rb_state , id = sendCMD(sock, "getRobotState")
# 停止状态 0,暂停状态 1,急停状态 2,运行状态 3,报警状态 4,碰撞状态 5
print('机器人状态:',rb_state)
# 获取虚拟输出 IO 状态(初始化状态)参数: addr:虚拟 IO 地址,范围:int [400,1535]
# m473:1表示初始化状态,0表示完成初始化状态
suc, rb_ini_state , id=sendCMD(sock,"getVirtualOutput",{"addr":473})
if rb_state ==4 or rb_ini_state == 1:
#清除报警
suc, result, id = sendCMD(sock, "clearAlarm")
#获取伺服抱闸打开情况
WaitBrakeOpen()
#获取同步状态
suc, Motorstatus, id = sendCMD(sock, "getMotorStatus")
if Motorstatus ==0:
#同步伺服编码器数据
suc, syncMotorStatus, id = sendCMD(sock, "syncMotorStatus")
#设置伺服使能状态
suc, servostatus, id = sendCMD(sock, "set_servo_status", {"status": 1})
# 获取精确状态
suc, rb_calib , id=sendCMD(sock,"getVirtualOutput",{"addr":472})
# m472为0表示未校准状态,1表示完成校准
if rb_calib ==0:
#编码器零位校准
suc, result , id=sendCMD(sock, "calibrate_encoder_zero_position")
suc, rb_calib , id=sendCMD(sock,"getVirtualOutput",{"addr":472})
while rb_calib ==0 :
suc, rb_calib , id=sendCMD(sock,"getVirtualOutput",{"addr":472})
time.sleep(0.1)






