透传(transparent transformation)是艾利特机器人EC系列中高阶的运动指令接口,允许用户自己设计并运行一段固定或者实时变化的路径。这项功能使用户可以完全控制运动路径的插补方式与运动速度,也可以在搭载了传感器和控制器的情况下实时控制机器人的运动,为用户在运动控制部分提供了较大的自由度。

例如,希望机器人从P001走到P000,并按照上图画一个圆(圆的点位由上位机实时计算),返回P000,最后回到P001,可以使用以下的代码。
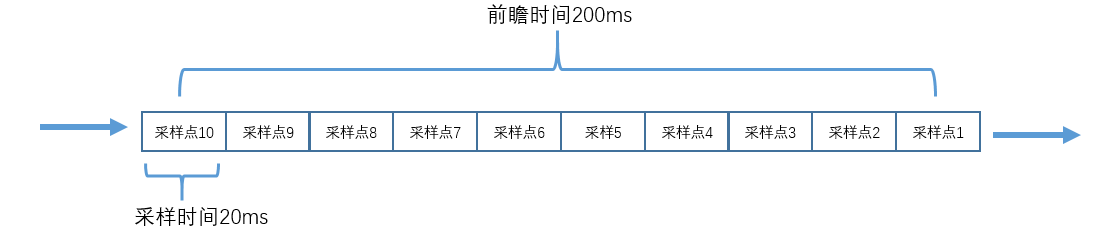
SDK示例代码中的相关透传术语解释如下图
import math
import socket
import json
import time
# Author:chenliao@elibot.cn
def connectETController(ip, port=8055):
sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
try:
sock.connect((ip, port))
return (True, sock)
except Exception as e:
sock.close()
return (False,)
def disconnectETController(sock):
if (sock):
sock.close()
sock = None
else:
sock = None
def sendCMD(sock, cmd, params=None, id=1):
if (not params):
params = []
else:
params = json.dumps(params)
sendStr = "{{\"method\":\"{0}\",\"params\":{1},\"jsonrpc\":\"2.0\",\"id\":{2}}}".format(cmd, params, id) + "\n"
try:
# print(sendStr)
sock.sendall(bytes(sendStr, "utf-8"))
ret = sock.recv(1024)
jdata = json.loads(str(ret, "utf-8"))
if ("result" in jdata.keys()):
return (True, json.loads(jdata["result"]), jdata["id"])
elif ("error" in jdata.keys()):
print(sock.error["code"])
print(sock.error["message"])
return (False, json.loads(jdata["error"]), jdata["id"])
else:
return (False, None, None)
except Exception as e:
return (False, None, None)
# 等待机器人完成动作
def wait_stop():
while True:
time.sleep(0.01)
ret1, result1, id1 = sendCMD(sock, "getRobotState")
# print(ret1,result1)
if (ret1):
if result1 == 0 or result1 == 4:
break
else:
print("getRobotState failed")
break
def checkPose(sock,p,delta):
# 判断机器人当前xyz坐标与传入的p的xyz坐标,
# 如果3个方向的差值均小于delta,返回True
ret1, c_pose, id = sendCMD(sock, "get_tcp_pose")
if abs(c_pose[0]-p[0])<delta and abs(c_pose[1]-p[1])<delta and abs(c_pose[2]-p[2])<delta:
return True
else:
return False
if __name__ == "__main__":
robot_ip = "192.168.1.200"
conSuc, sock = connectETController(robot_ip)
# 如果机器人有报警,清除报警
ret1, result1, id1 = sendCMD(sock, "getRobotState")
if result1==4:
ret, result, id = sendCMD(sock, "clearAlarm")
print(ret, result)
#获取同步状态
suc, Motorstatus, id = sendCMD(sock, "getMotorStatus")
if Motorstatus ==0:
#同步伺服编码器数据
suc, syncMotorStatus, id = sendCMD(sock, "syncMotorStatus")
#设置伺服使能状态
suc, servostatus, id = sendCMD(sock, "set_servo_status", {"status": 1})
# 设置机器人运行速度百分比
suc, result , id = sendCMD(sock, "setSpeed", {"value": 100})
# 设置机器人开始位置,类型joint
P000 = [-36.0662,-110.6173,98.9087,-78.2932,90.0004,53.8916]
P001 = [-36.0659,-109.1445,91.6433,-72.5008,90.0004,53.8916]
# MoveJ形式移动机器人到P001位置,速度为百分比
suc, result, id = sendCMD(sock,'moveByJoint', {'targetPos':P001, 'speed':10})
# 等待机器人移动到位
wait_stop()
# 直线形式移动机器人到P000位置,速度类型0:线性速度, 速度100mm/s
suc, result, id = sendCMD(sock,'moveByLine', {'targetPos':P000, "speed_type" :0, "speed":100})
# 等待机器人移动到位
wait_stop()
# 获取开始位置的笛卡尔坐标
ret1, startpose, id = sendCMD(sock, "get_tcp_pose")
print('startpose', startpose)
suc, result, id = sendCMD(sock, 'get_transparent_transmission_state')
if result ==1:
# 如果处于透传状态,先清空之前的队列数据
suc, result, id = sendCMD(sock, "tt_clear_servo_joint_buf")
time.sleep(0.5)
# tt:transparent transmission: 透传
# 设置透传的lookahead时间为200ms
# 设置透传的采样时间为20ms,
# 即机器人会每20ms把上位机发来的最后一次数据存入机器人tt队列的最后一个数据,并剔除tt队列的第一个数据
# 即透传队列长度为200/20 = 10
# 设置透传平滑度为1,范围0-1
lookahead_time =200 #ms
sample_time = 20 #ms
smoothess = 1 #范围0-1
suc, result, id = sendCMD(sock, "transparent_transmission_init", {"lookahead": lookahead_time, "t": sample_time, "smoothness": smoothess})
# 机器人在开始透传运动的时候,会先将当前位置全部填入tt的运动队列
# 即机器人收到新的数据,新的数据会存入tt队列最后一个并剔除第一个数据,机器人就会运动
r = 50 #画半径为50mm的圆
startpose[0] = startpose[0] +r
Pout =startpose.copy()
step = 1
# 每1°发一个点
# 可以调节点之间的距离,变相调节机器人速度
for i in range(0,360,step):
Pout[0] = startpose[0] - r * math.cos(math.radians(i))
Pout[1] = startpose[1] + r * math.sin(math.radians(i))
suc, result, id = sendCMD(sock, "tt_put_servo_joint_to_buf", {"targetPose": Pout})
# 发送的数据类型是笛卡尔的xyzabc类型Pose
# 也可以使用sendCMD(sock, "tt_put_servo_joint_to_buf", {"targetPos": Pout})发送joint类型数据
time.sleep(0.02)
# 延时20ms
# 通过调节该延时,达到调整机器人速度
while checkPose(sock,Pout,2)==False:
# 如果机器人没有走到透传的最后的目标点,一直发送最后一个点
suc, result, id = sendCMD(sock, "tt_put_servo_joint_to_buf", {"targetPose": Pout})
time.sleep(0.02)
suc, result, id = sendCMD(sock, "tt_clear_servo_joint_buf")
wait_stop()
suc, result, id = sendCMD(sock,'moveByLine', {'targetPos':P001, "speed_type" :0, "speed":100})
# 等待机器人移动到位
wait_stop()






