本文使用松下FP-XH 32K C40ET。
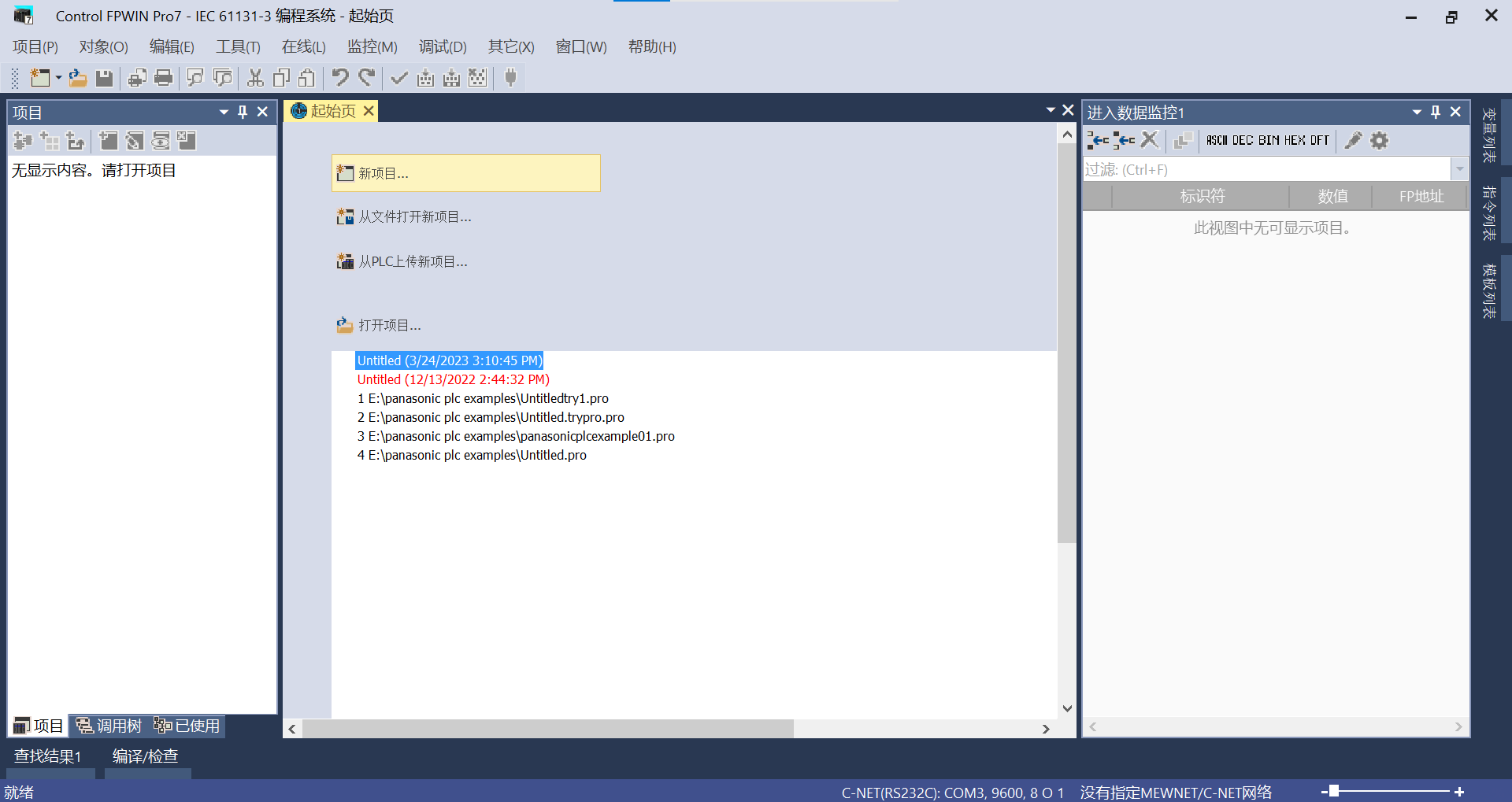
打开松下PLC相应软件,选择“新项目”。注意PLC机型需与实际一致。本文语言使用LD(梯形图)。

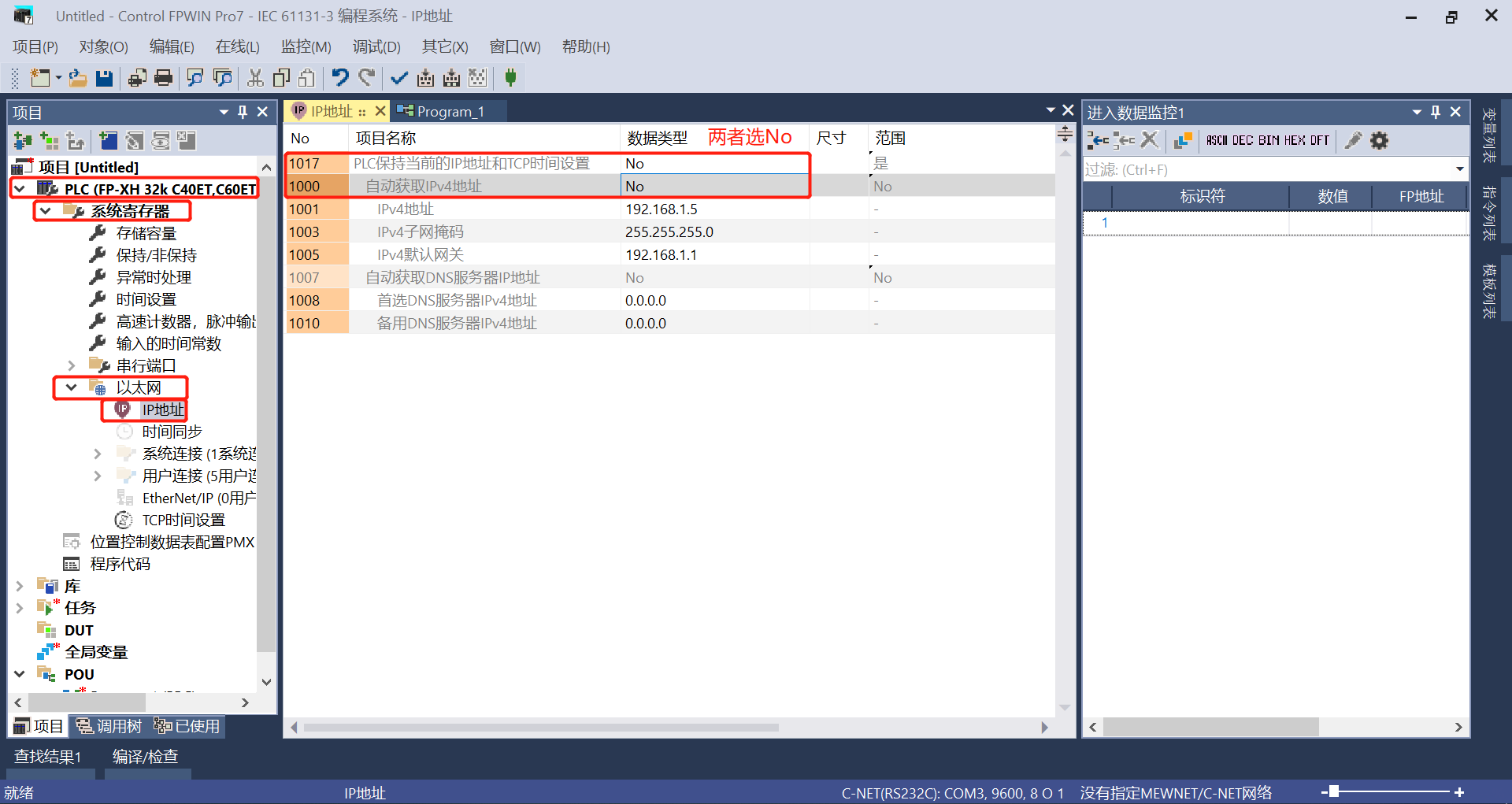
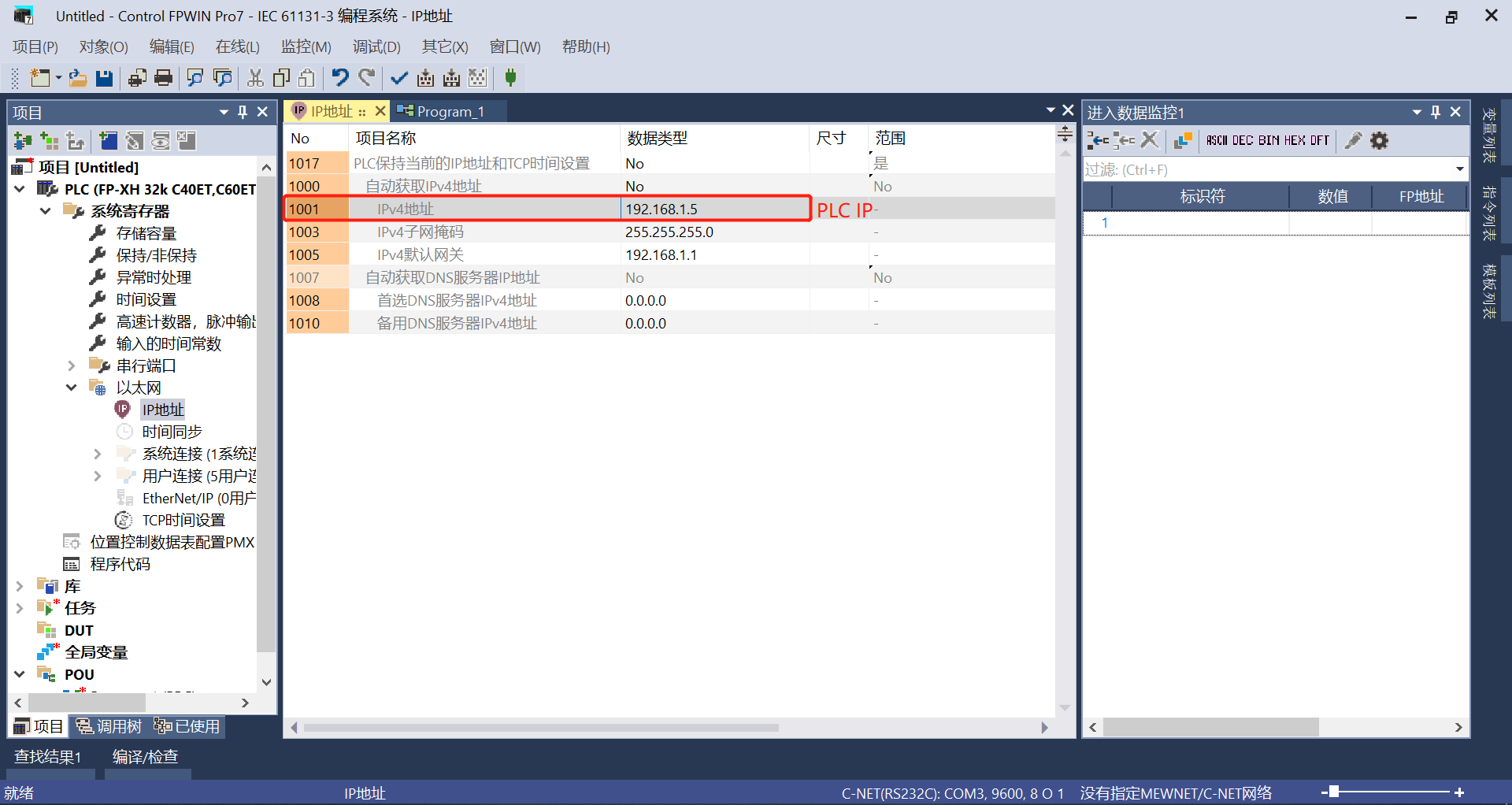
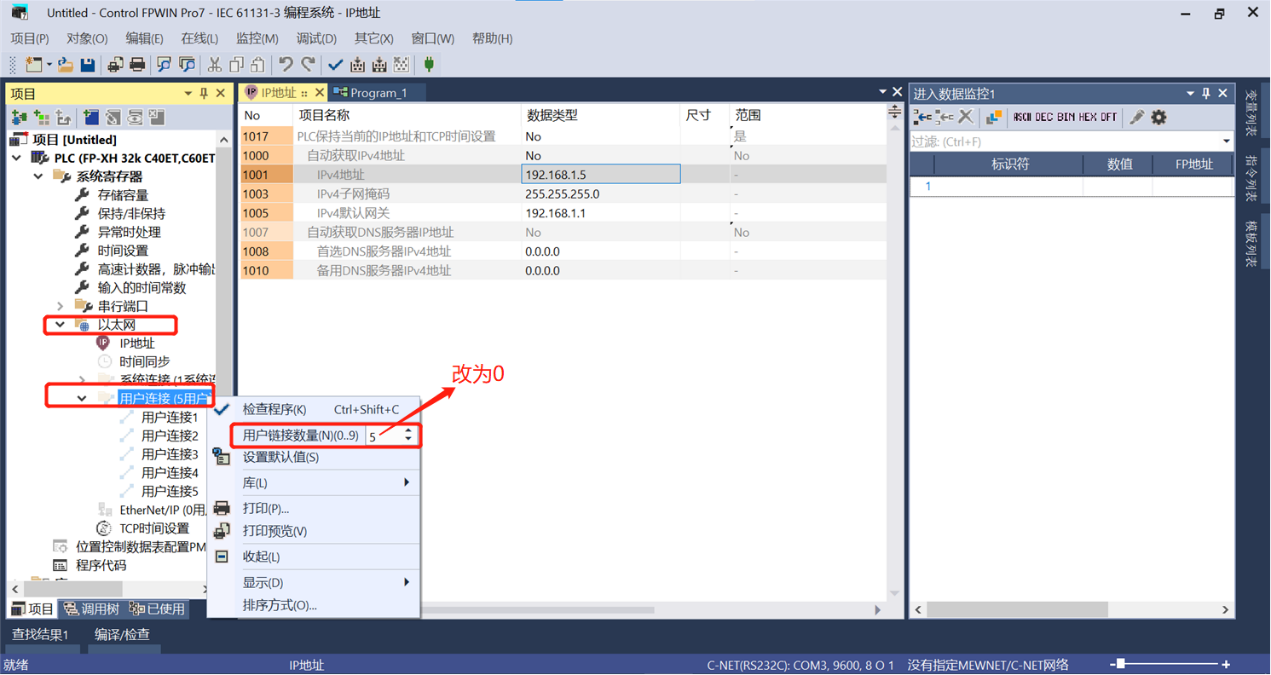
进入新项目后,点击左侧的PLC,下拉选择“系统寄存器”-“以太网”-“IP地址”,请注意“PLC保持当前的IP地址和TCP时间设置”和“自动获取IPv4地址”都需设置为“否No”。此处“IPv4”地址配置为PLC ip地址。
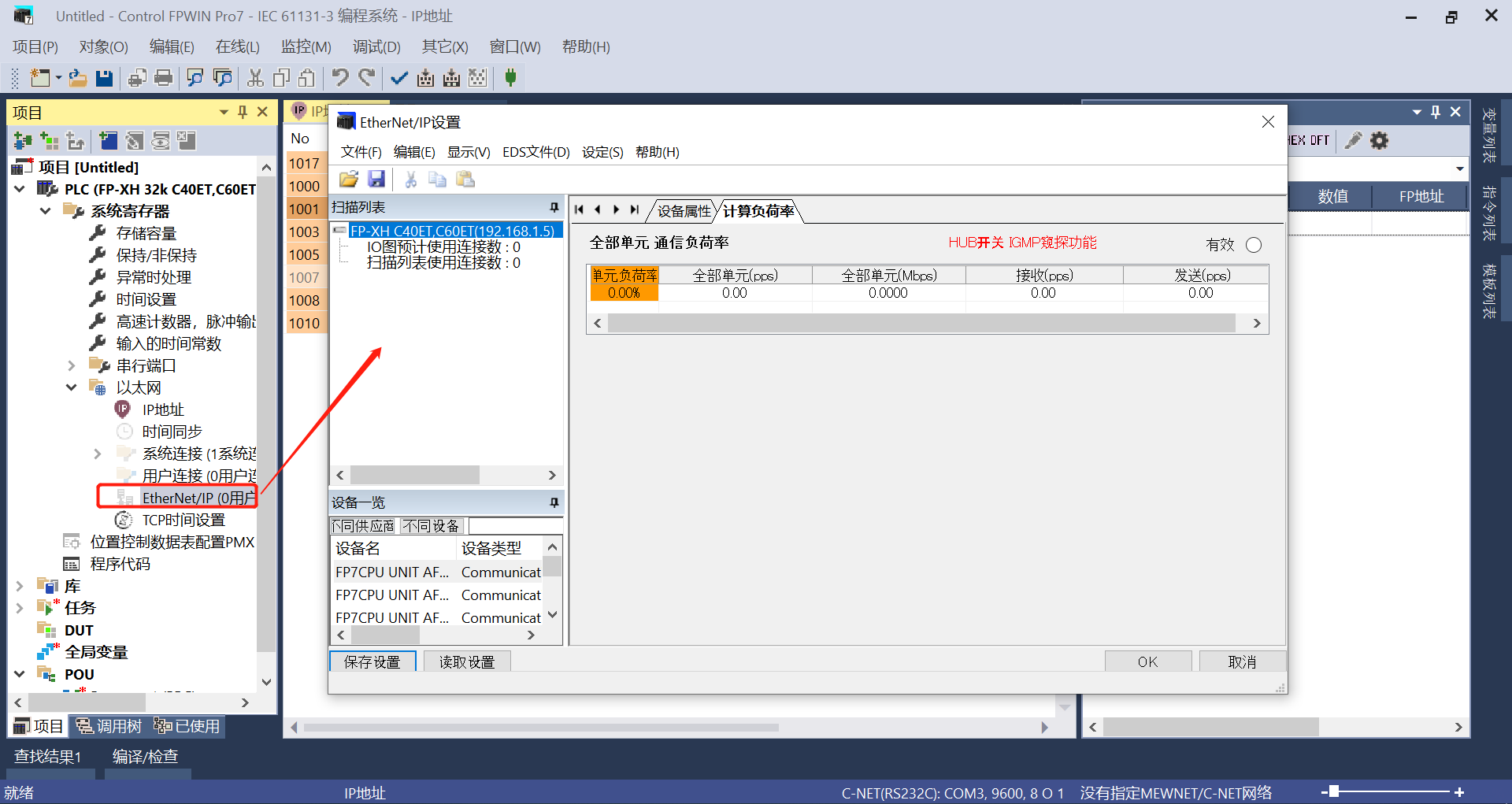
因本例无需使用“用户连接”,在 “以太网”选中“用户连接”,将数量改为0。点击“ETherNET/IP”,进入“ETherNET/IP设置”窗口。
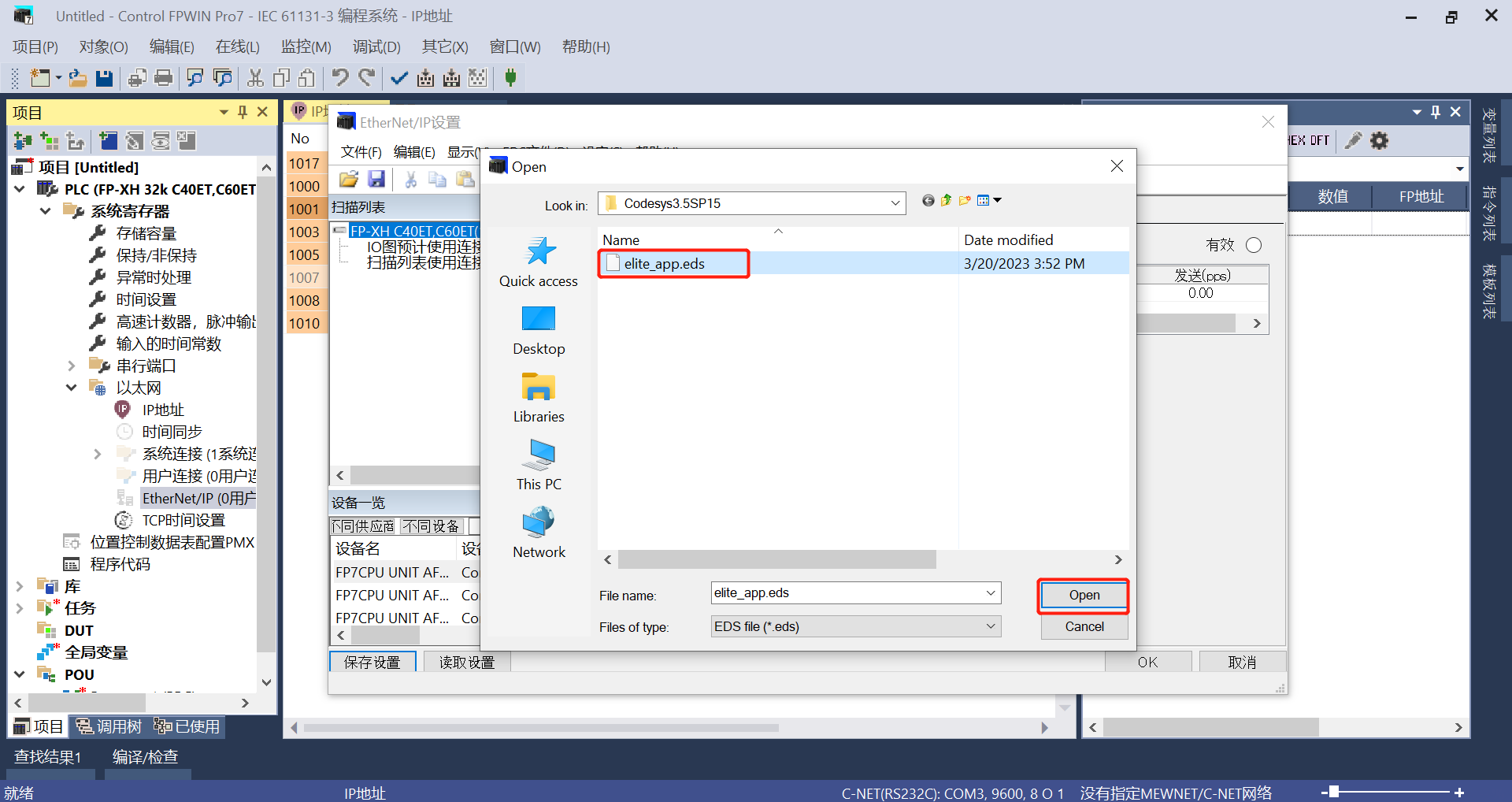
点击“EDS文件”-“登录”,找到本地的EC机器人eds文件,点击“打开”。

Elite
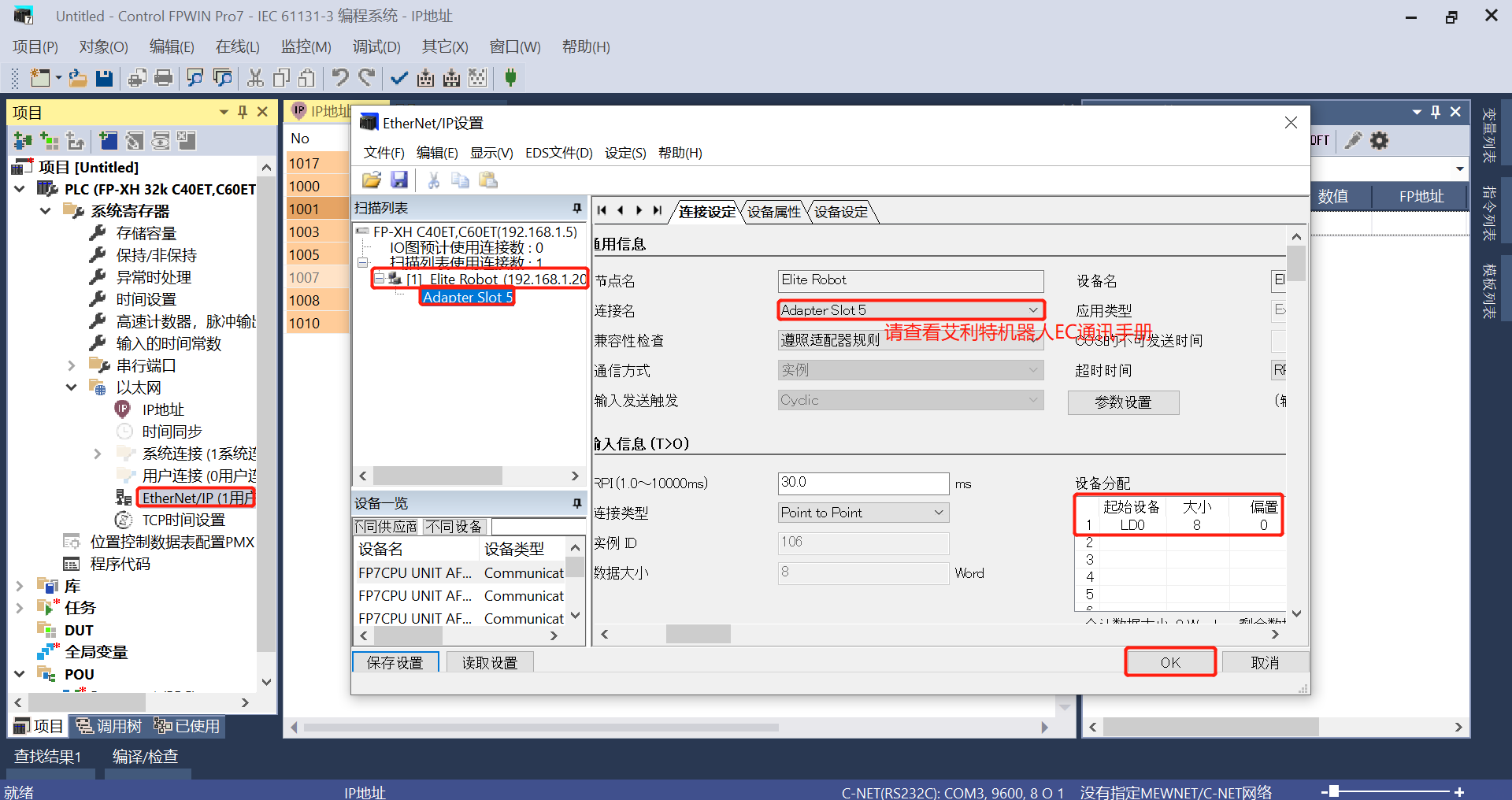
EC机器人即Elite Robot将出现在窗口左下角“设备一览”-“设备名”列表,左键将Elite Robot拖动到左上“扫描列表”(出现+号时释放左键)。拖动完成后,单击“Elite Robot”,在“设备设定”中将“IP地址”设置为使用的机器人IP(与PLC在同一网段),点击“OK”。


配置机器人IP后,点击Elite Robot下方的Adaptor Slot(默认为Adaptor Slot 0)。本例中选择对应数字输入数字输出的Slot 5(详情可查看艾利特机器人EC系列官方通讯手册,或参考文末图片)。超时时间为PRI*4。起始位默认为LD0。T > O表示机器人到PLC, O>T表示PLC到机器人。
回到主界面后,点击上方编译图标 ,“进行项目编译”弹窗选择“编译全部”。“项目下载到PLC”弹窗选择“将程序代码和配置下载到PLC”,若未出现该窗口,则可手动点击主菜单“在线”-“下载程序代码和配置”选项。耐心等待,连接成功。
,“进行项目编译”弹窗选择“编译全部”。“项目下载到PLC”弹窗选择“将程序代码和配置下载到PLC”,若未出现该窗口,则可手动点击主菜单“在线”-“下载程序代码和配置”选项。耐心等待,连接成功。


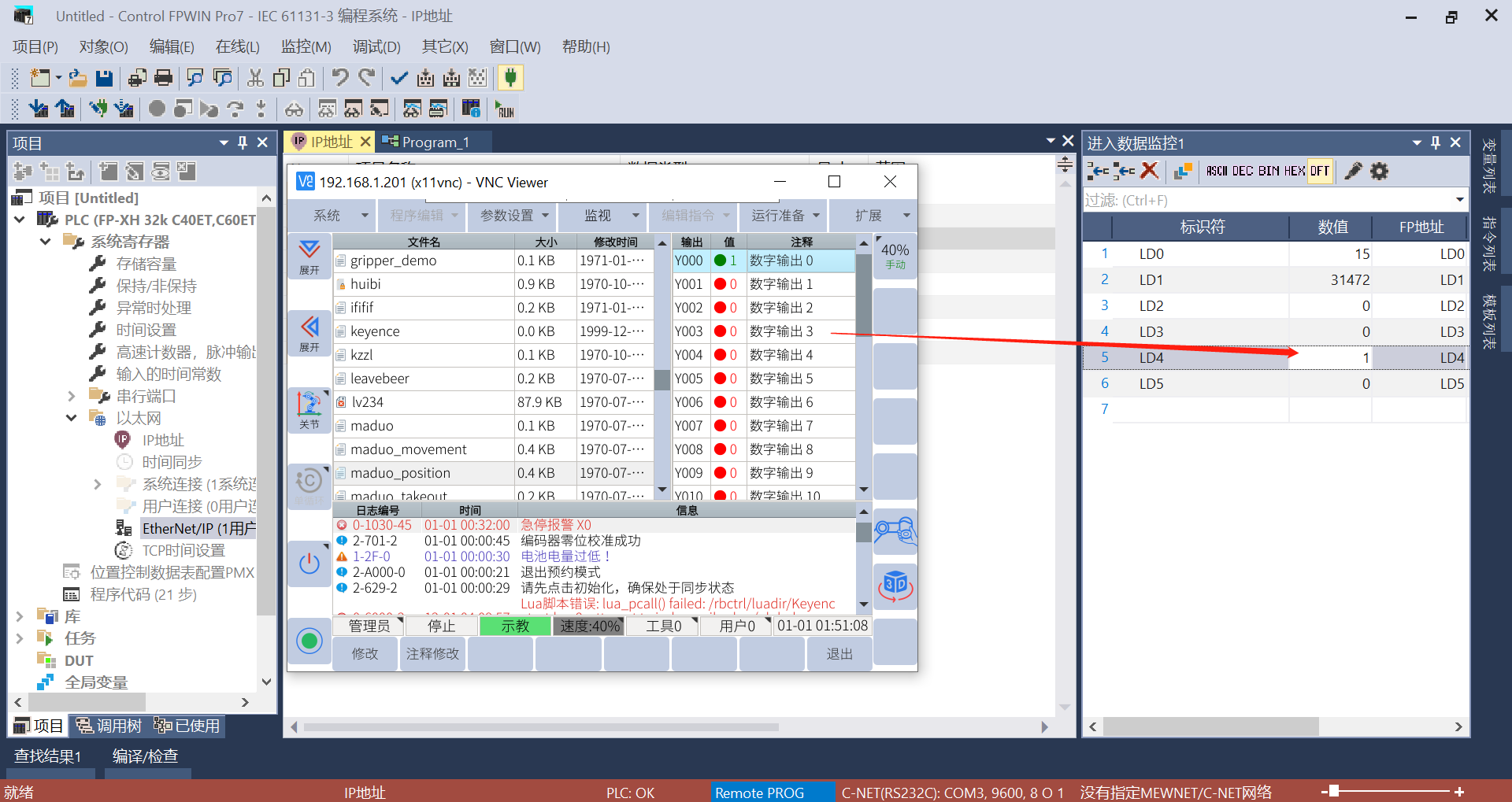
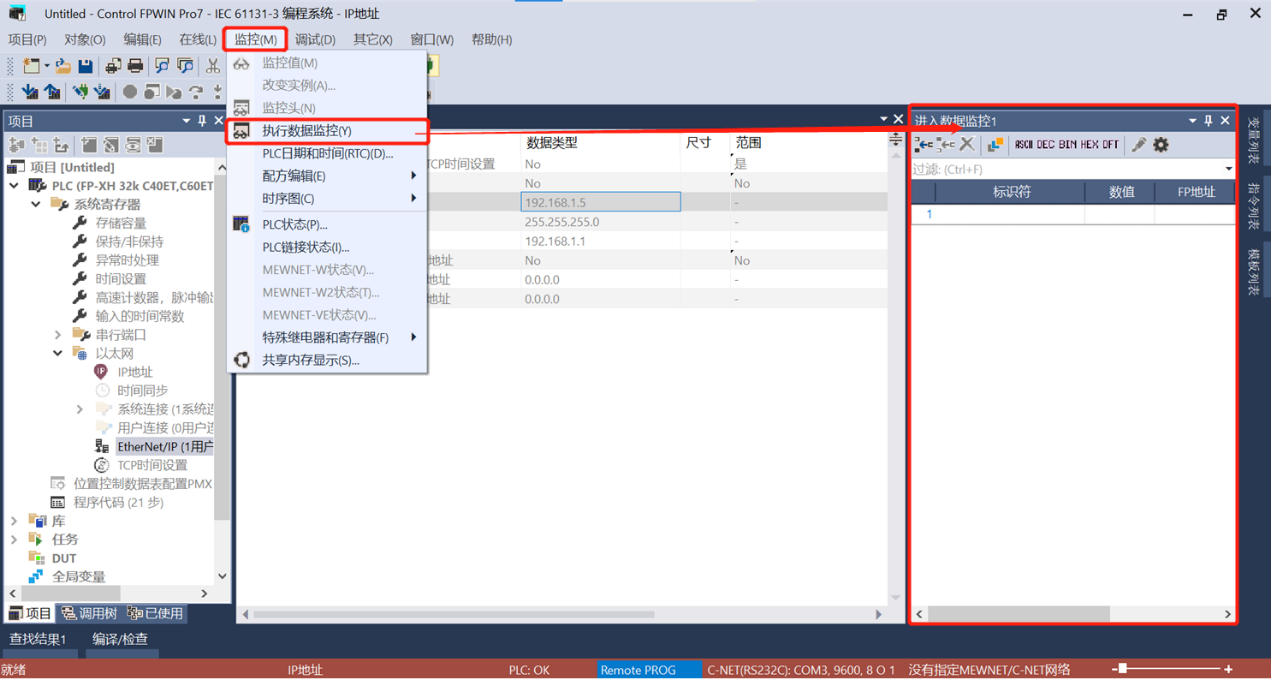
若未自动出现监控窗口,请点击上方“监控”-“执行数据监控”,右侧将出现“进入数据监控”窗口。
数字输出即Y000-Y019对应LD4和LD5。其中Y000-Y015对应LD4;Y016-Y019对应LD5。在机器人上修改数字输出,可看到LD4和LD5的值相应变化。(例如Y000=1,Y002-Y015皆为0,LD4=20*1+0+0+…+0=1。Y000=1,Y002=1,Y003-Y015皆为0,LD4=20*1+21*1+0+0+…+0=3。Y000=1,Y002=1,Y003=1,Y004-Y015皆为0,LD4=20*1+21*1+22*1+0+0+…+0=7.etc)