EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
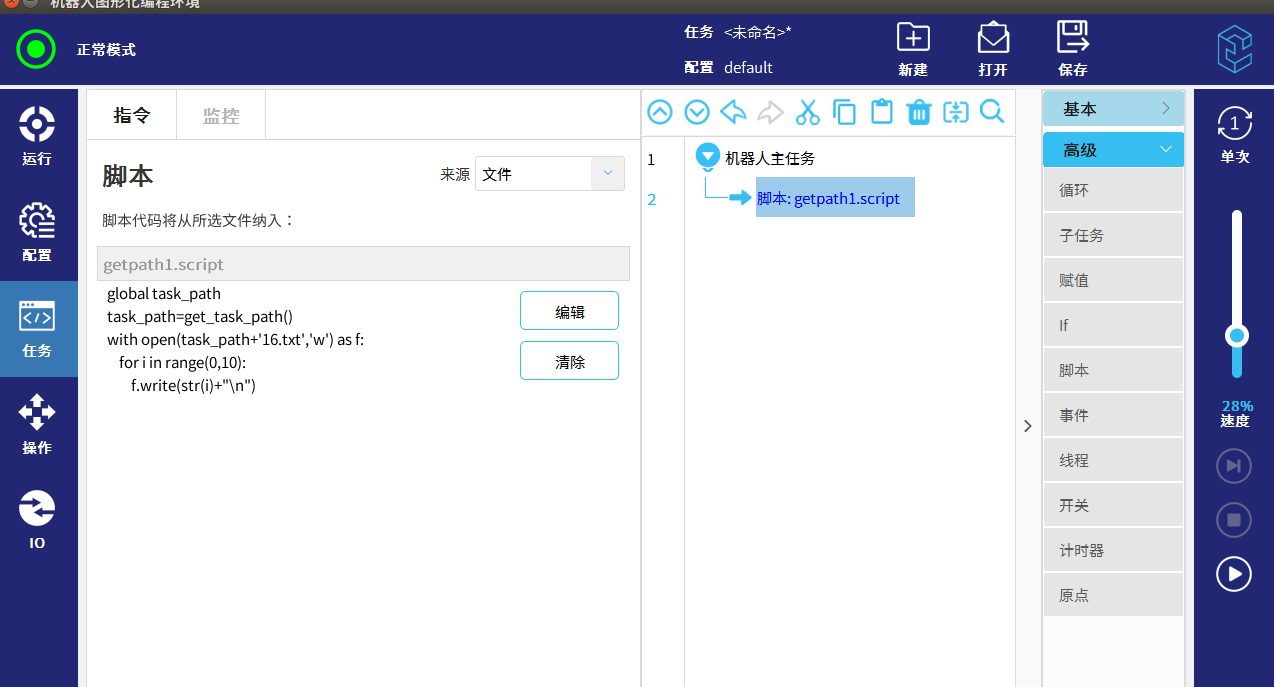
此方法适用于软件版本2.5及以上!!
例如要在机器人控制器的默认program文件夹下,新建并写入一个名字为"16.txt"的文件,可以先通过函数get_task_path获取当前机器人控制器的program文件夹的路径(对于仿真和真实控制器均有效,返回的路径不同)