CSのModbus_レジスタとコイル_検索表 ダウンロード:
Elite CS シリーズは、標準 Modbus TCP プロトコルを介したロボットの内部データの取得または変更をサポートしています。
CS シリーズは、Modbus プロトコルをサポートする他のスレーブ デバイスにアクセスするためのマスター として使用できます。
また、他の Modbus マスター からのアクセス要求を受け入れるためのスレーブとしても使用できます。この時には、デフォルトのポートは 502 です。
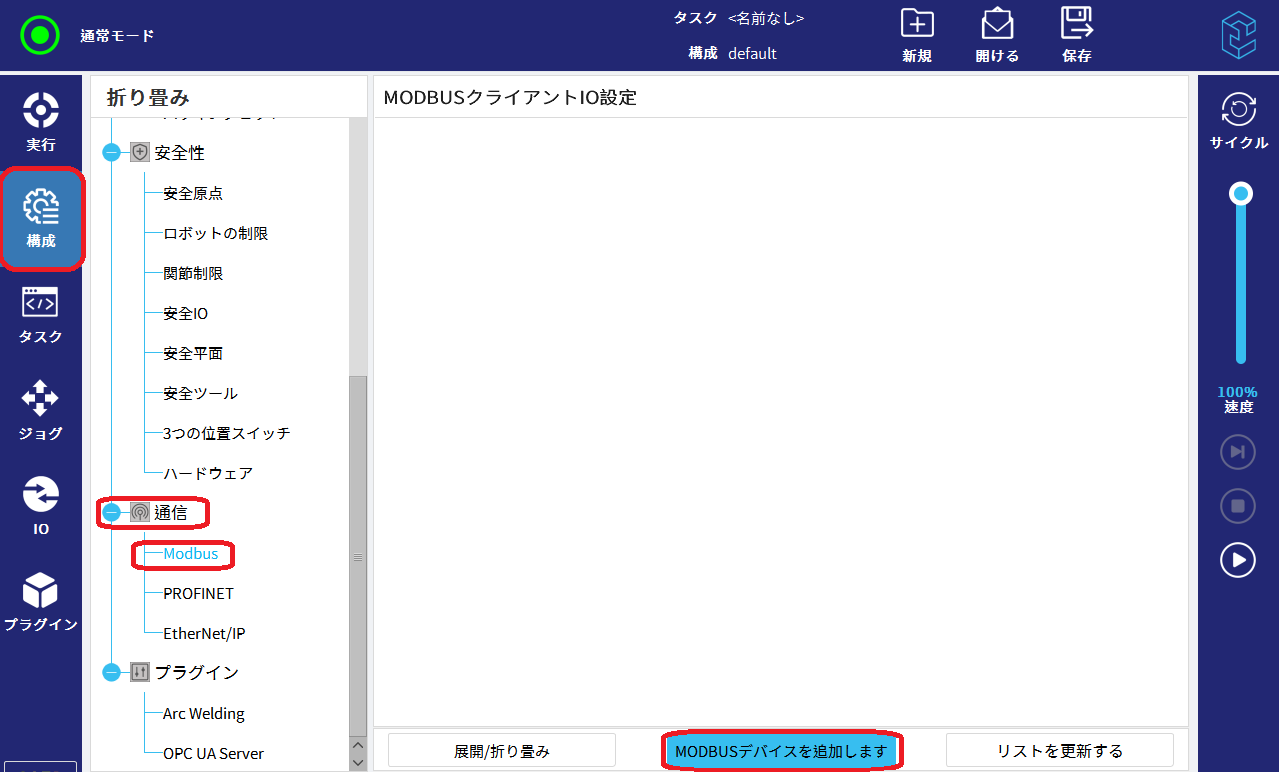
①Modbus マスター を設定します。 [構成] - [通信] - [Modbus] - [Modbus デバイスを追加します]
(新しい Modbus アドレスの追加を参照、CS Modbus は最大 200 個の信号をサポートします)
②下図に示すように、スレーブの IP アドレス、読み取りまたは書き込みが必要なレジスタアドレス、読み取りまたは書き込みが必要なレジスタの種類、新しい信号の追加を入力します。
(事前にロボットとスレーブ機器を同じIPネットワークセグメントに設定してから、新規信号を追加してください。)
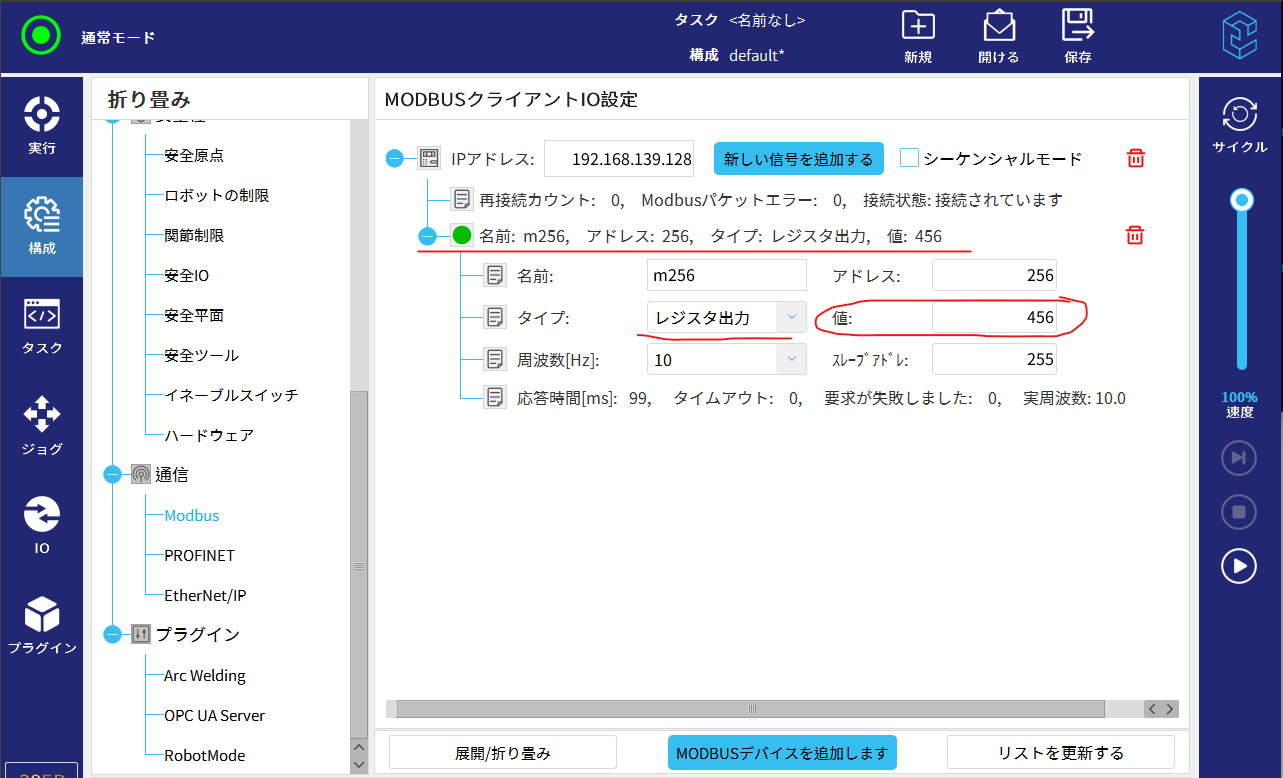
③ 設定が完了すると、スレーブのIPアドレスに対応するデータの書き込みまたは読み取りが可能になります。 ランプが緑色で接続が成功したことを示します。
このセクションでは、CS ロボットのシミュレーターをスレーブとして構成します。 (今回はModbus Pollがマスターとなります。)
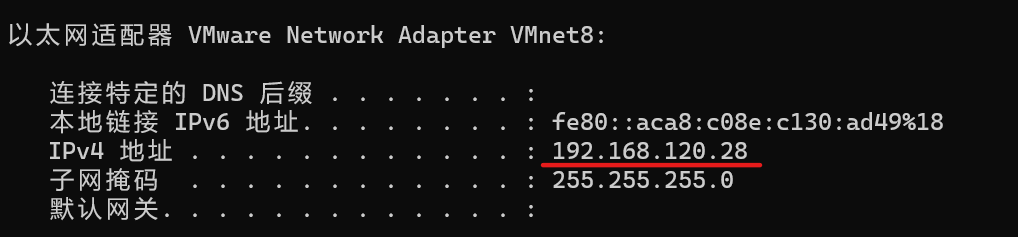
①CS 仮想マシンで新しいターミナル ウィンドウを開き、ifconfig と入力して、ローカル IP を確認します。 実際の CS ロボットの場合は、FB1 の IP アドレスを確認してください (もちろん、事前にFB1ポートにネットワーク ケーブルで接続する必要があります)
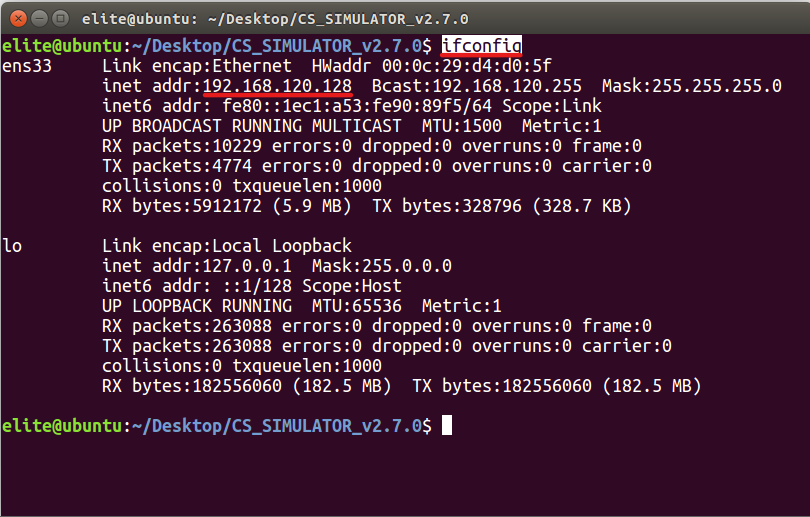
②コンピュータの IP アドレスを、CS 仮想マシンの IP アドレスと同じネットワーク セグメントにあるように変更します (実際の CS ロボットが接続されている場合は、IP アドレスとFB1の同じネットワーク セグメントにあるように変更してください)
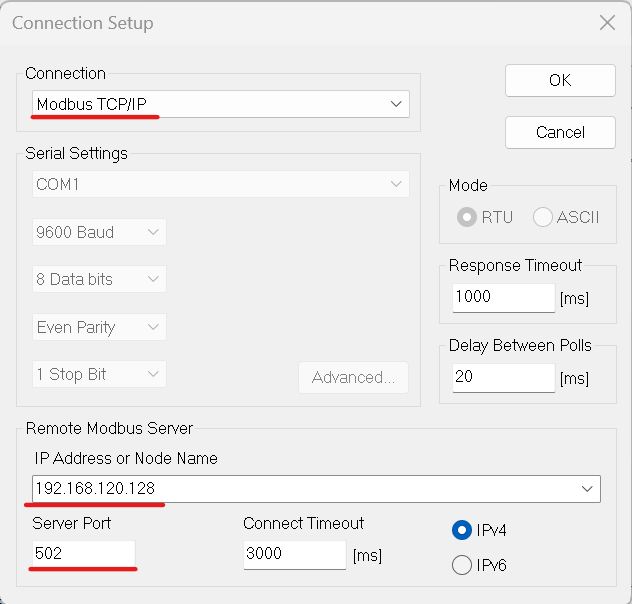
③ Modbus Poll(ソフトウェア)を開き、Modbus TCP/IP を選択し、IP アドレスとポートを設定します (図の IP アドレスは 192.168.120.128、ポートは 502)。
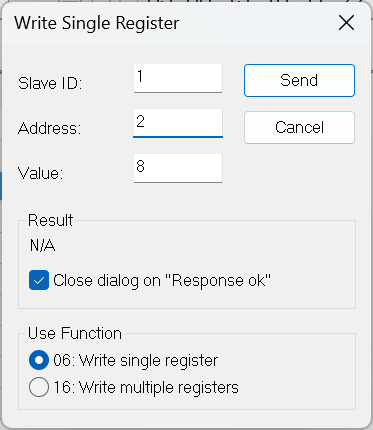
④例:レジスターの値を書き込みます。
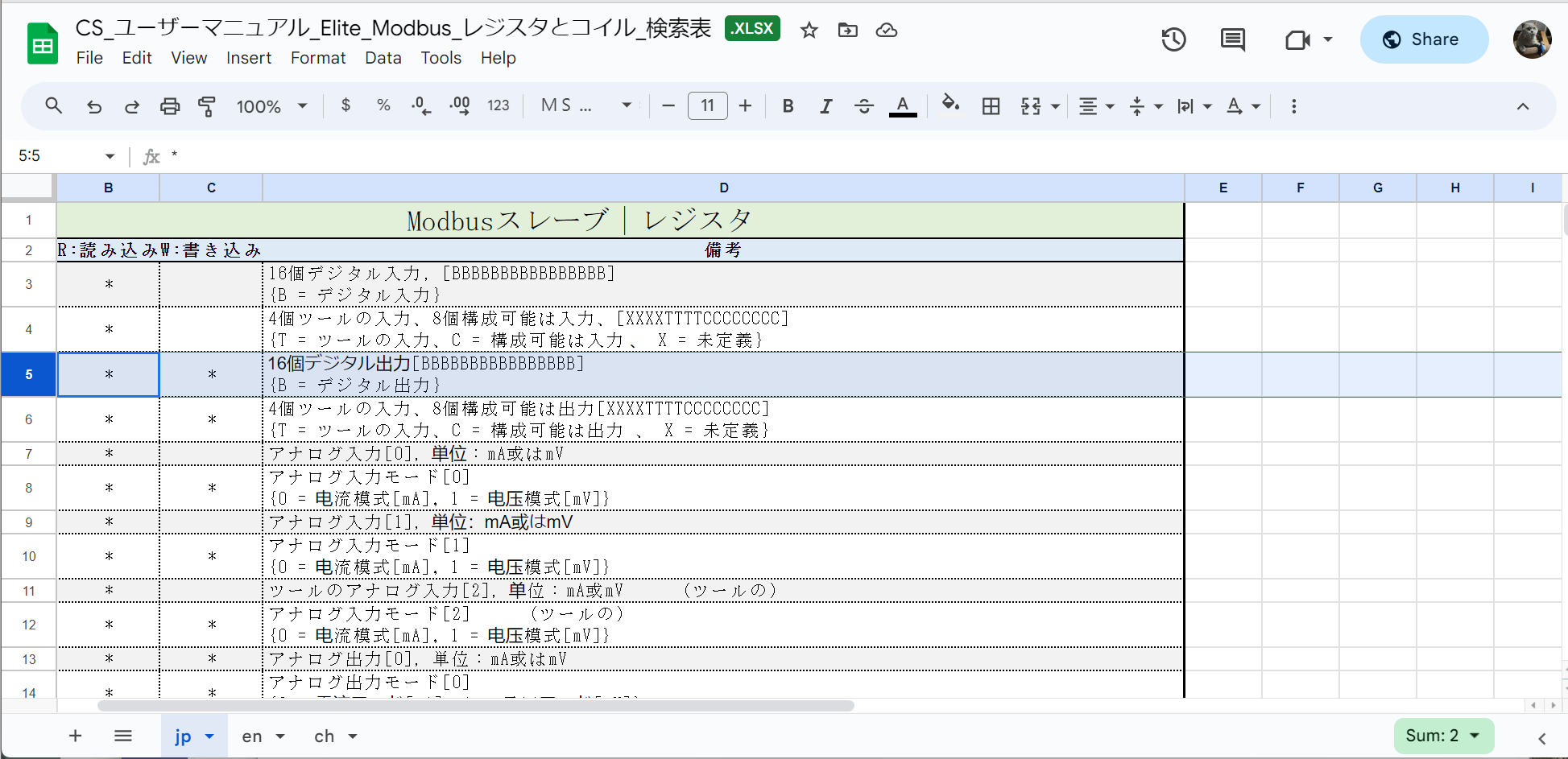
この記事の最初にある MODBUS データシート (ダウンロード可能) を見ると、2 番目のレジスタは読み取りと書き込みの両方が可能なレジスタであり、16 個のデジタル出力の値を格納していることがわかります。
次に、2 番目のレジスタを例に挙げてみましょう (同じ方法が他の読み取り可能および書き込み可能なレジスタにも当てはまります)。
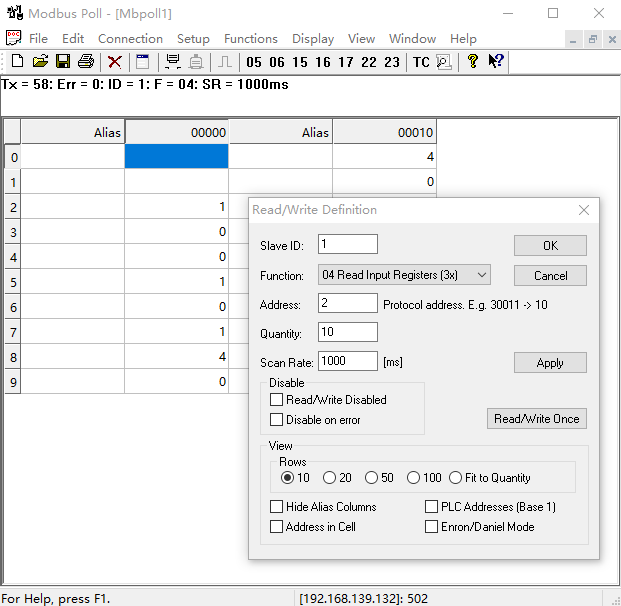
Modbus Poll に「Function」から「06: Write Single Register」を選び、
2 番目のレジスタに 8 を入力すると、DO3 の値は true、他のデジタル出力の値は false になります。
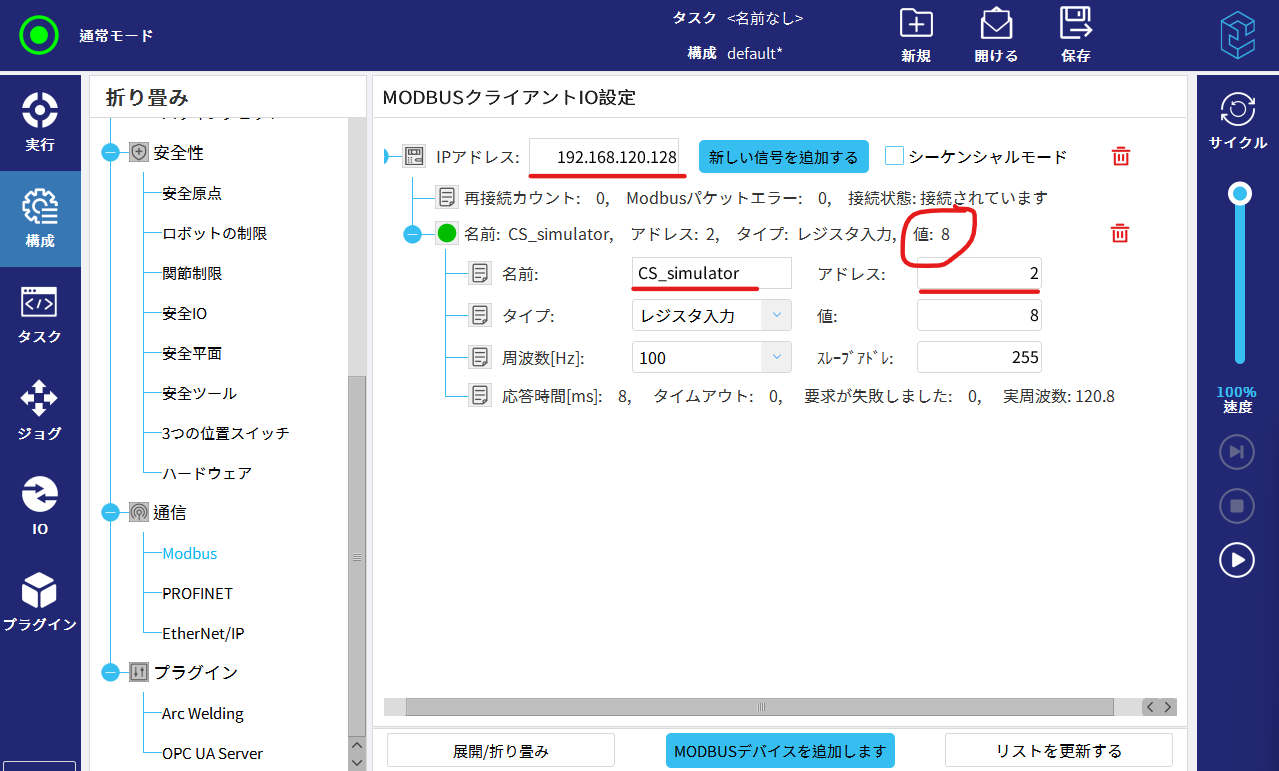
あとのティーチングペンダントの表示:

このとき、CS シミュレータの接続を作成し、マスターとして確認することもできます。これにより、8 の結果も表示されます。
(ランプが緑色で接続が成功したことを示します。)