现场有若干有规律圆,希望在示教第一个圆的轨迹后,自动完成下图的阵列圆,如何实现?
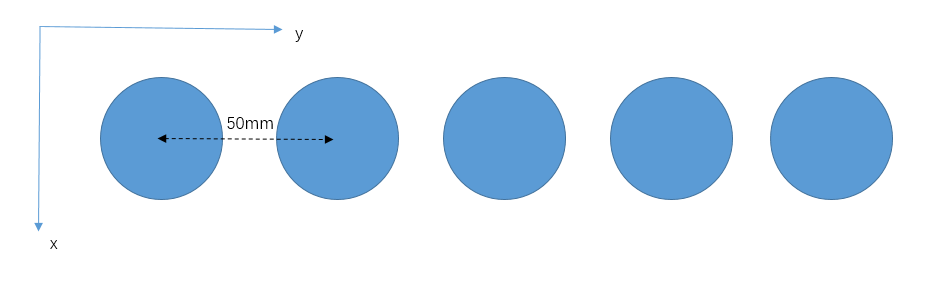
可以参考以下代码,机器人在user1坐标系,例如基于y方向偏移示教的圆的4个点
NOP // author:chenliao@elibot.cn // 用tool1在user1坐标系对第一个圆的4个点示教 SETPOSE V000 389.0975,-160.5474,19.0308,-3.1416,0.0000,-2.0255 SETPOSE V001 406.1312,-142.2775,19.0290,3.1415,0.0000,-2.0254 SETPOSE V002 390.0442,-120.7384,19.0326,3.1416,0.0000,-2.0255 SETPOSE V003 370.1416,-142.2856,19.0419,-3.1416,0.0000,-2.0255 SETJOINT P000 -36.1689,-80.6006,100.9443,-110.3445,90.0004,-10.1165 // home位置 // 全程用tool1和user1坐标系 SETPOSE V020 0,0,0,0,0,0 SETUSERFRAME USER#(1) V020 SET D001 30 // 设置x方向间距 SET D002 50 // 设置y方向间距 SET D003 30 // 设置z方向间距 SET D004 20 // 开始点抬高距离(在circle1.jbi中用,根据实际修改抬高方向) SET B010 5 // 设置单行总个数 SET V010 V000 SET V011 V001 SET V012 V002 SET V013 V003 SET B000 0 LABEL *START CALL JOB: circle1 // 以下按照user1坐标系的Y方向偏移,根据实际修改 ADD V010(1) D002 ADD V011(1) D002 ADD V012(1) D002 ADD V013(1) D002 INC B000 JUMP *START IF B000<B010 END
circle1.jbi
NOP SET V015 V010 ADD V015(2) D004 // 开始点抬高20mm MOVEL V=100.0MM/S CR=5.0MM ACC=10 DEC=10 TOOL#(1) USER#(1) V015 MOVEL V=100.0MM/S CR=0.0MM ACC=10 DEC=10 TOOL#(1) USER#(1) V010 MOVEC V=100.0MM/S CR=20.0MM ACC=10 DEC=10 TOOL#(1) USER#(1) V011 V012 MOVEC V=100.0MM/S CR=0.0MM ACC=10 DEC=10 TOOL#(1) USER#(1) V013 V010 MOVEL V=100.0MM/S CR=0.0MM ACC=10 DEC=10 TOOL#(1) USER#(1) V015 END






