Path: Different movement methods can be selected in Mission-Basic-Movement. Specific parameters can be set in the "Command" column on the left.
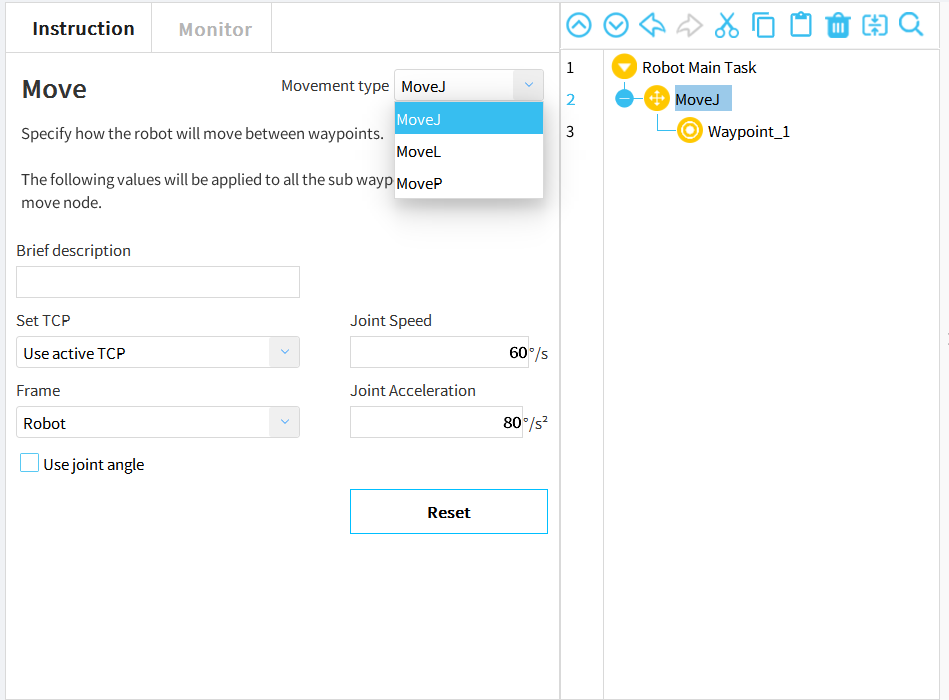
【MoveJ】Joint movement.
【MoveL】Linear movement. Make the tool center point (TCP) move in a straight line
between waypoints.
【MoveP】Craft movement. Make TCP move in an arc at a constant speed.
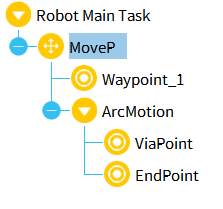
Add arc motion:
1. Click "Task > Basic > Move" to add a move node.
2. Select movement type as "MoveP".
3. Click "Add an arc motion".
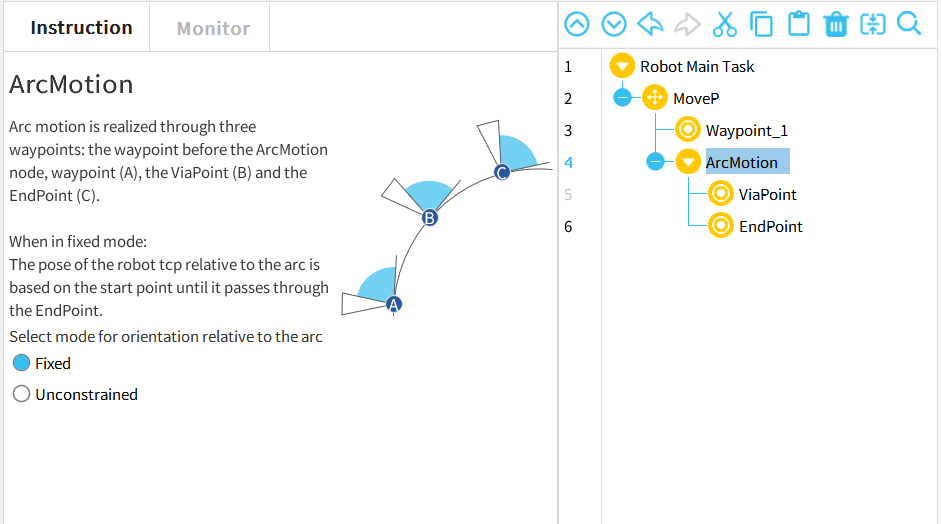
Teach the passing point and end point(renameable) , and the waypoint under MoveP. These 3 points form an arc.
Note:
Fixed: when the robot passes through points A, B and C, the tangent angle
between the robot pose and the corresponding point shall be consistent;
Unconstrained: when the robot passes through points A, B and C, the tangent
angle between the robot pose and the corresponding point shall be subject to
the actual needs, which is not consistent