When the robot cannot move due to accidental collision etc., it is necessary to use the backdrive function of the robot.
The entry method is as follows:
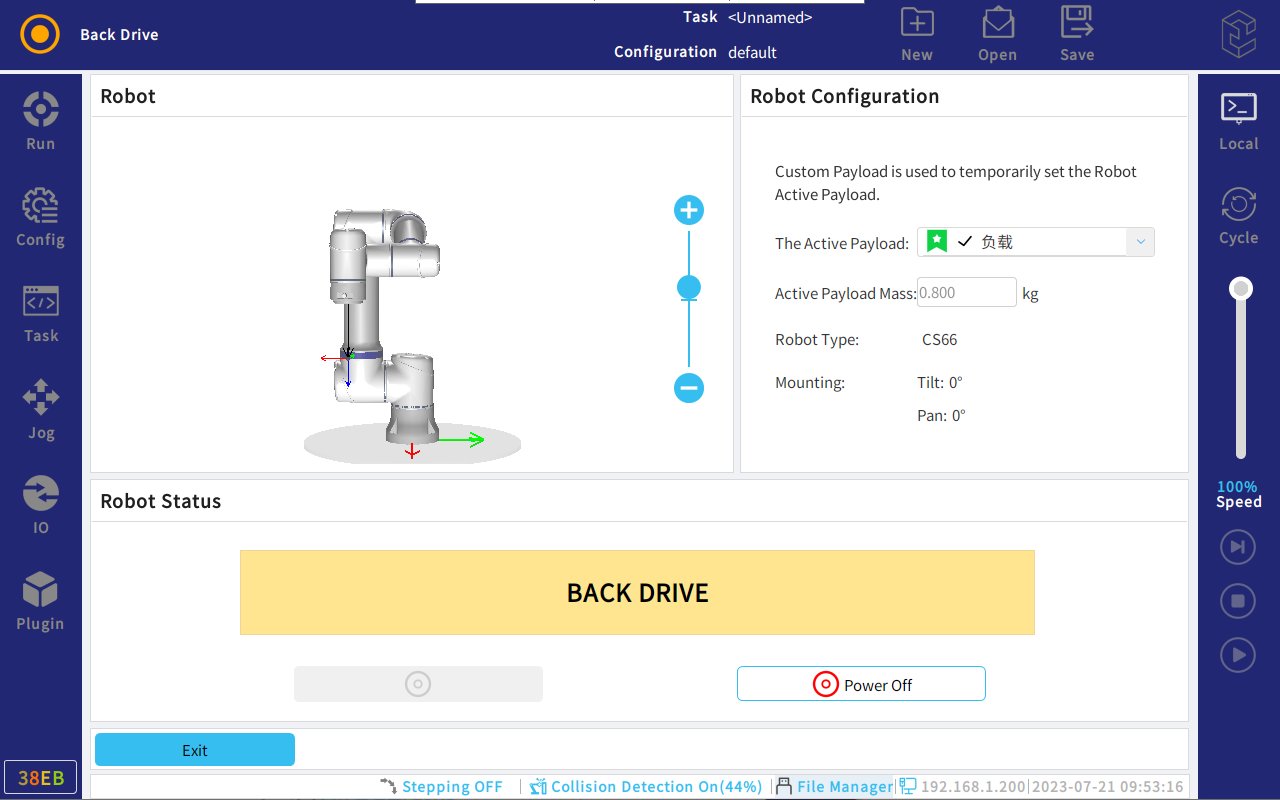
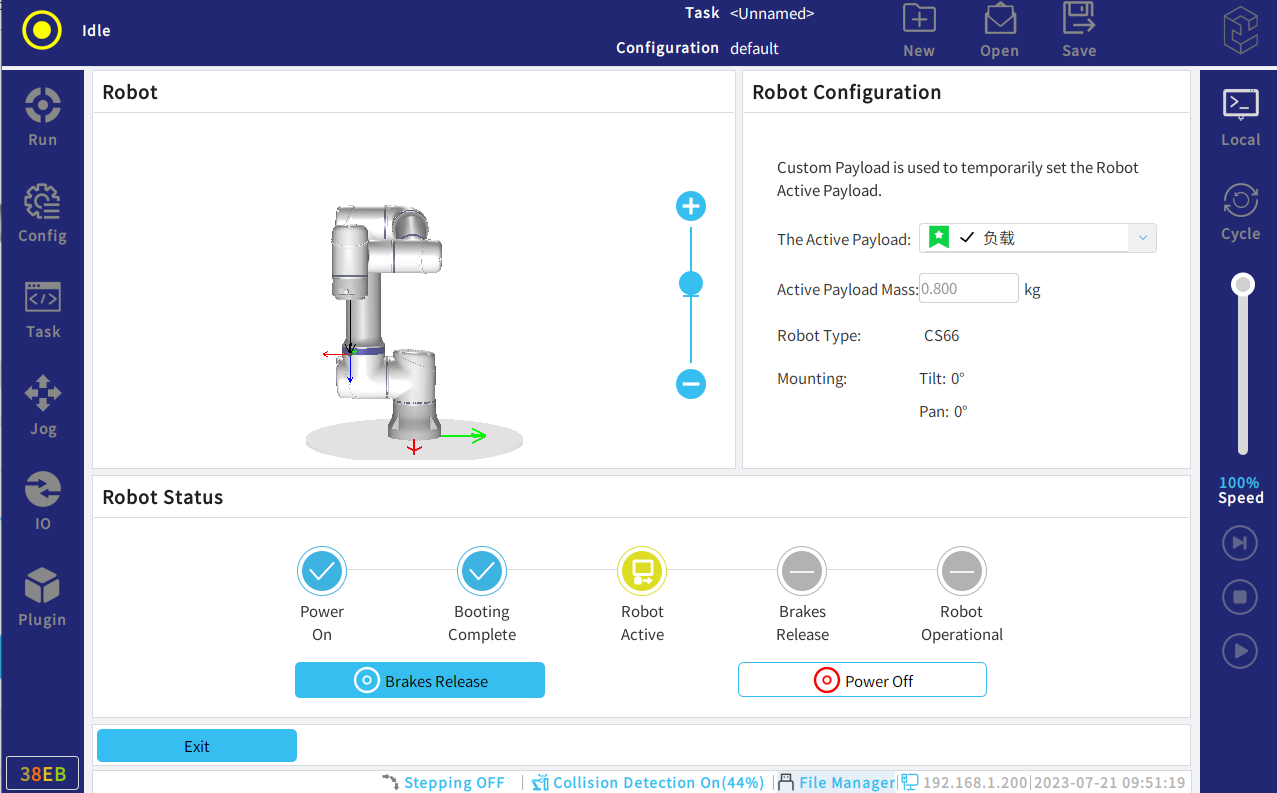
1. Click “Power Off" on the left up corner. The robot enters the following interface, click "Power On".
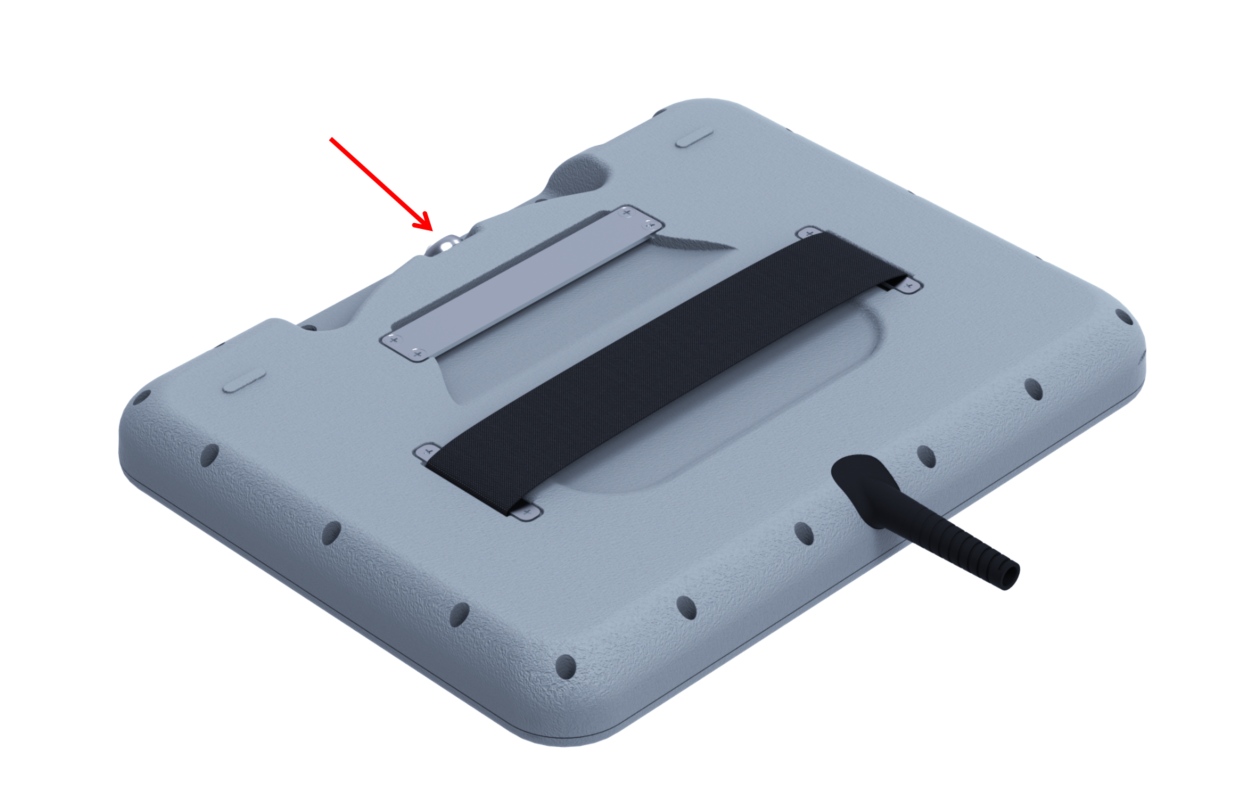
Press and hold the drag enable switch on the reverse side of the teach pendant, and the robot enters the "backdrive" mode. We can now move the robot joints.