
The position and movement of the actual robot can be monitored in RoboDK.
Preparation: PC and the real robot need to be under the same internet.
1. Create a new station.
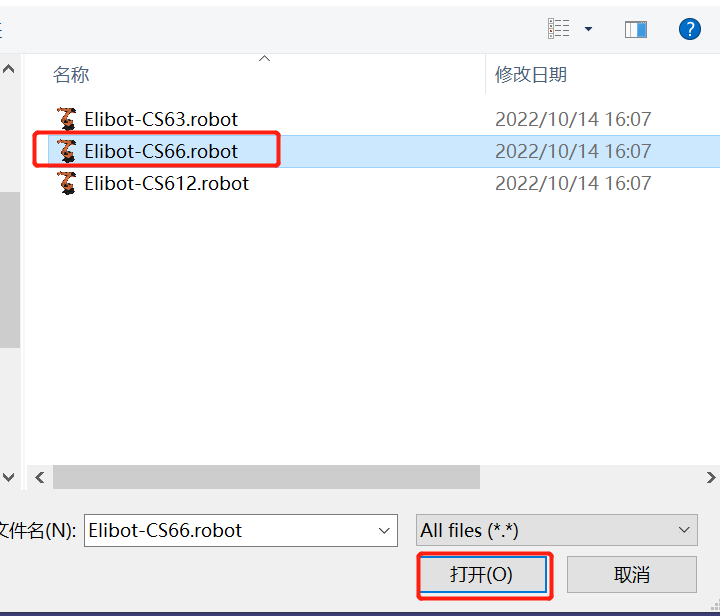
2. Click "Open", choose the CS robot of the same size as the real robot, then "Open".
3. Click "Connect" in the main menu, then "Connect robot", enter the real robot ip and port(30001), click "ping" to check if the connection is successful.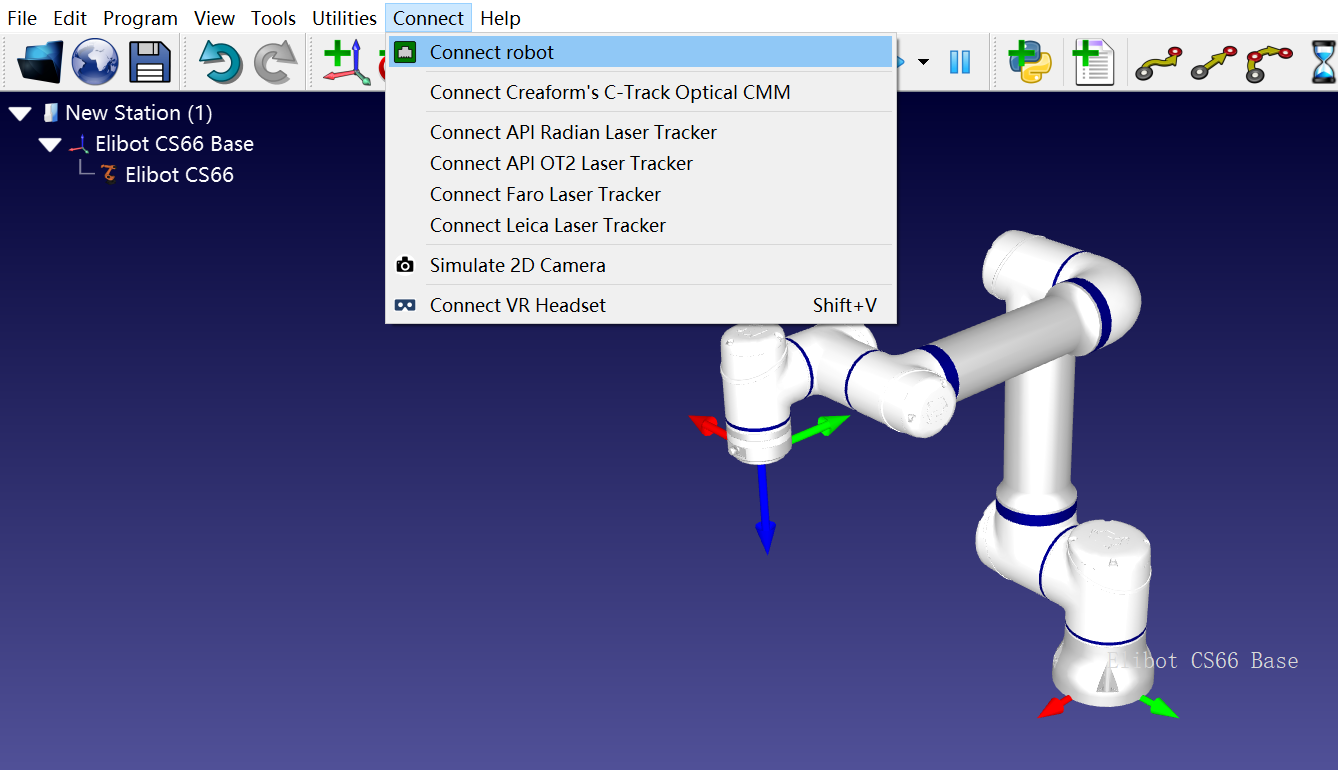

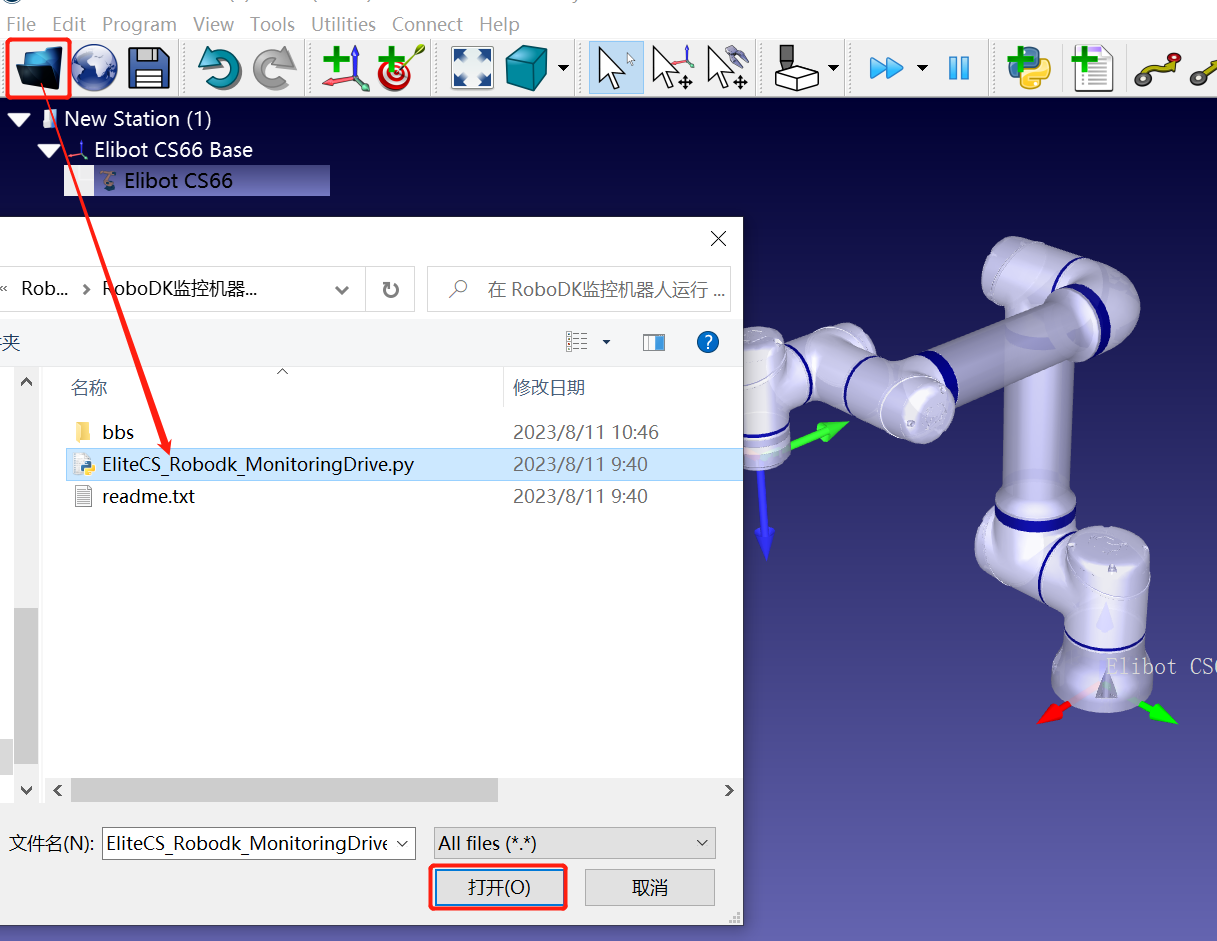
4. To achieve this function, EliteCS_Robodk_MonitoringDrive_1.py is necessary, please download here.
"Open"- choose "EliteCS_Robodk_MonitoringDrive_1.py" and open it.
5. Choose the python file and right click "EliteCS_Robodk_MonitoringDrive_1" and then click "Run Python script".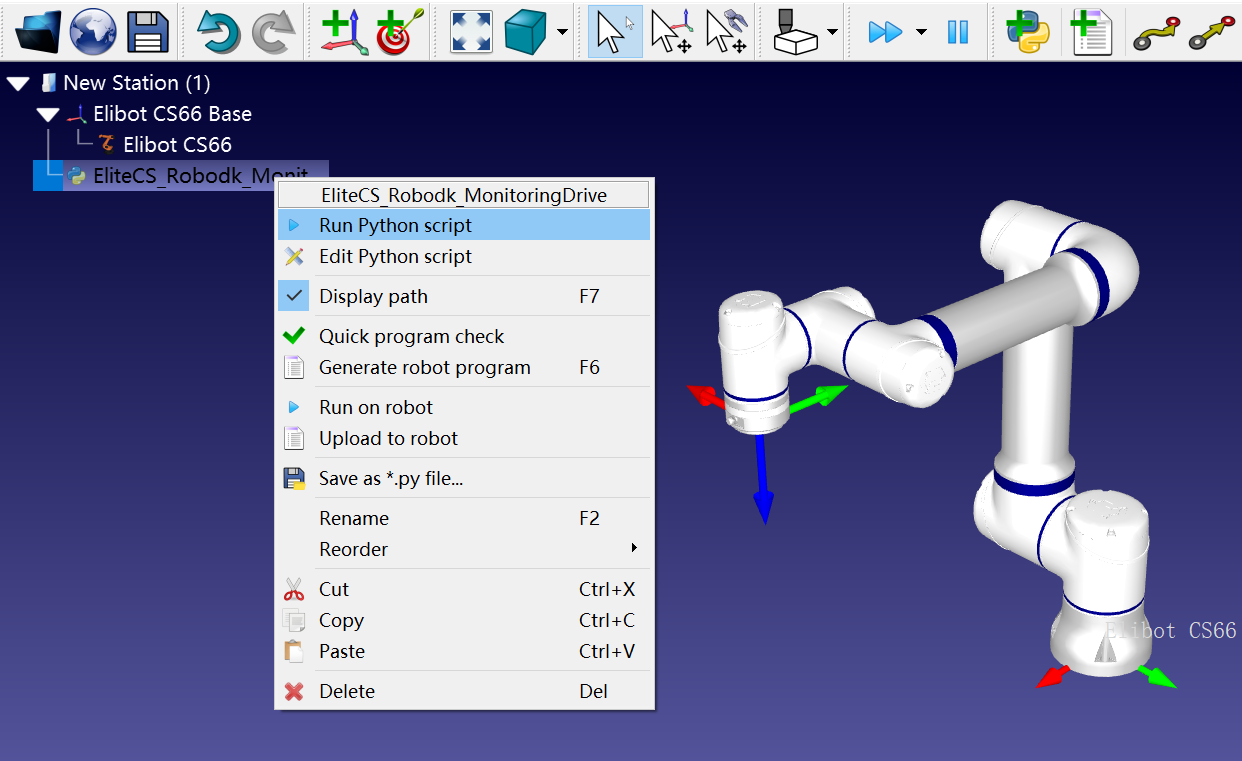
If it didn't work, please confirm if the parameters(robot type, IP, port) and the python(right click-"Edit Python script") are correct.





