
CS机器人现支持在RoboDK仿真中监控实时运动。
操作只需以下几个步骤:
1. 准备:PC需与机器人在同一网段下,使用FB1网口。
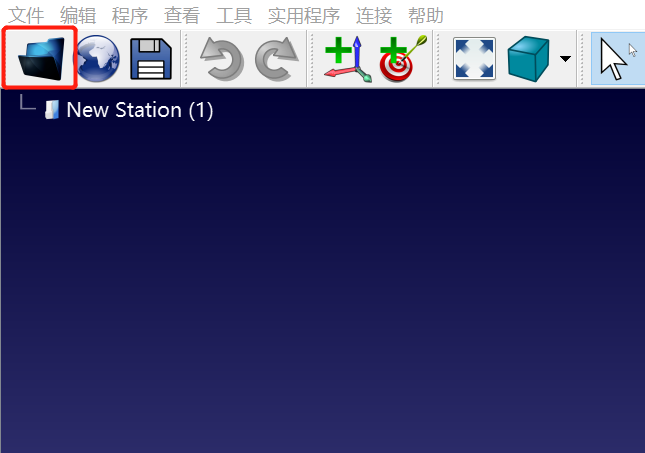
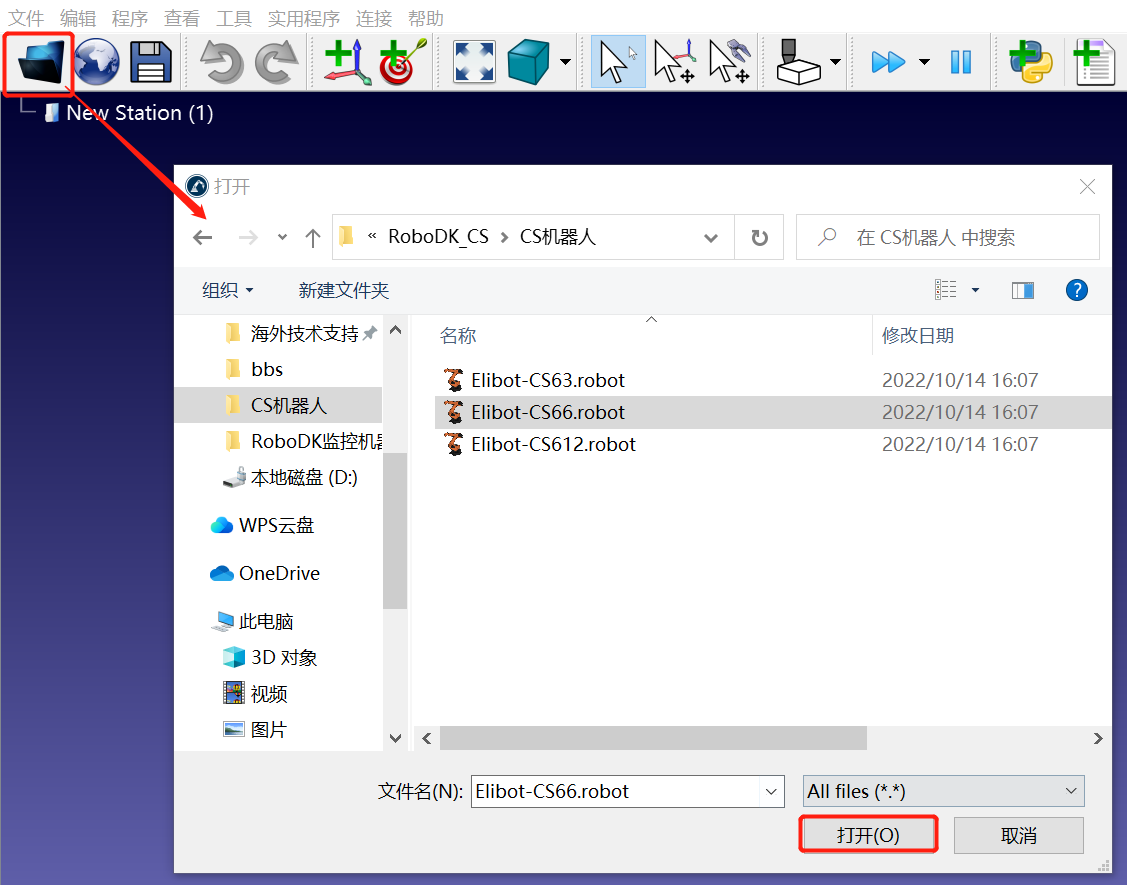
2. 打开RoboDK,新建方案,点击左上角“打开”-导入与实际CS机器人型号一致的机器人模型-“打开”。
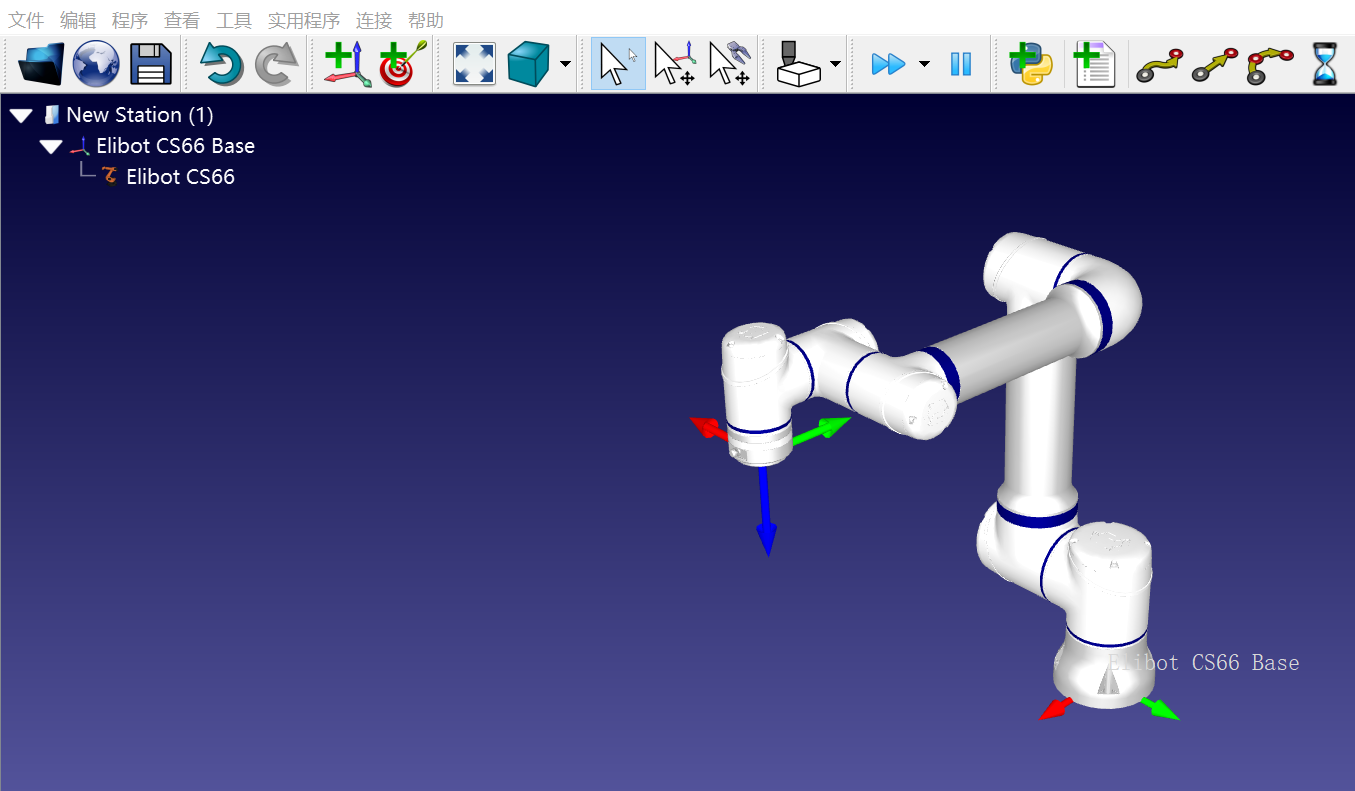
导入后如下图。
3. 点击主菜单“连接”-“连接机器人”,在左侧正确填入实际CS机器人的IP地址(FB1),端口号30001,点击“ping”测试是否能连上。显示“成功”,点击“OK”关闭窗口。


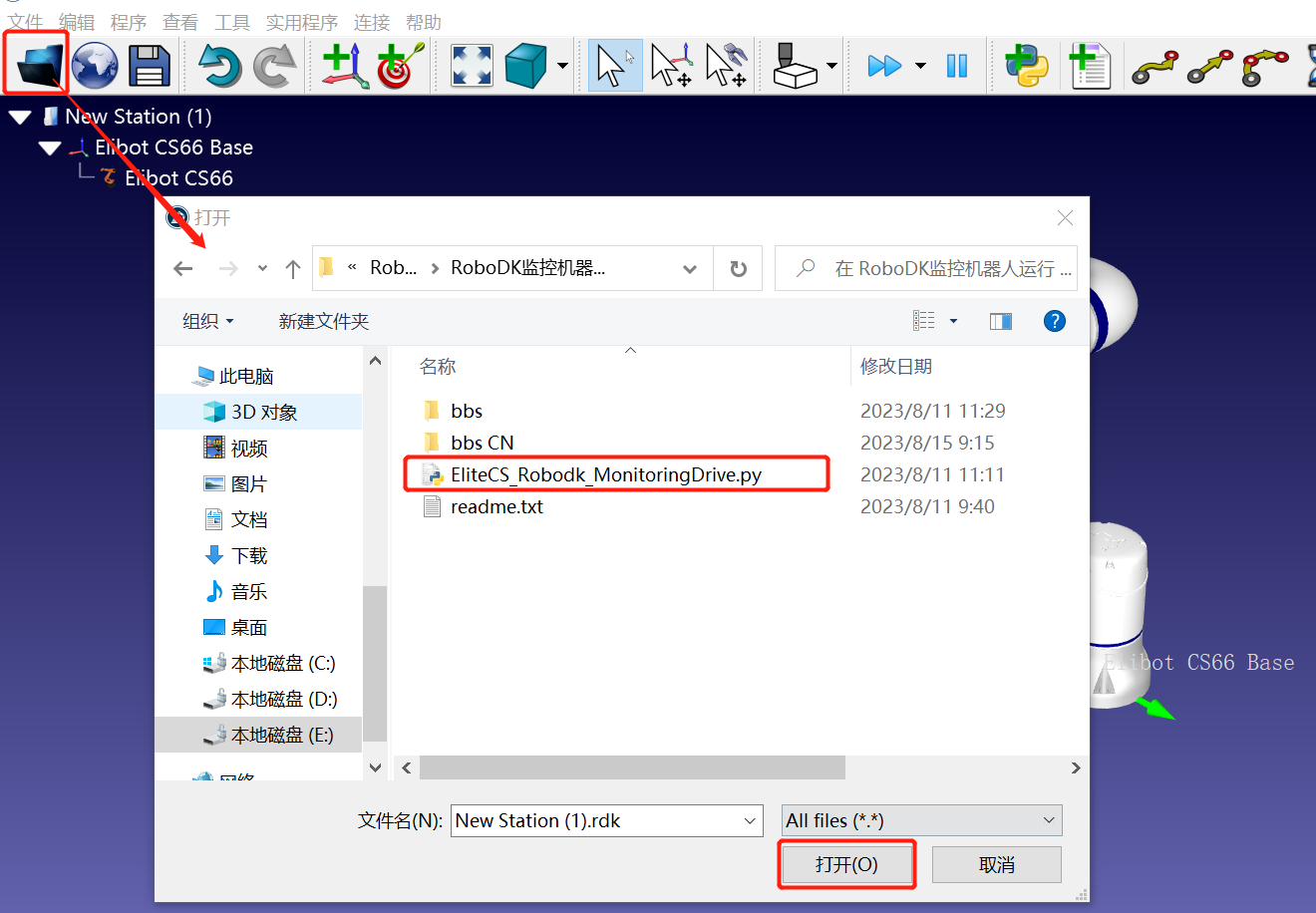
点击左上角“打开”-选择“EliteCS_Robodk_MonitoringDrive.py”。
下载地址:
【超级会员V1】通过百度网盘分享的文件:RoboDK监控....zip
链接:https://pan.baidu.com/s/14ASZkTau_REGpYPIvClidw?pwd=X166
提取码:X166
复制这段内容打开「百度网盘APP 即可获取」
选中该Python,右键选择“运行Python脚本”,此时RoboDK中的CS模型将随着CS真机而实时运行。
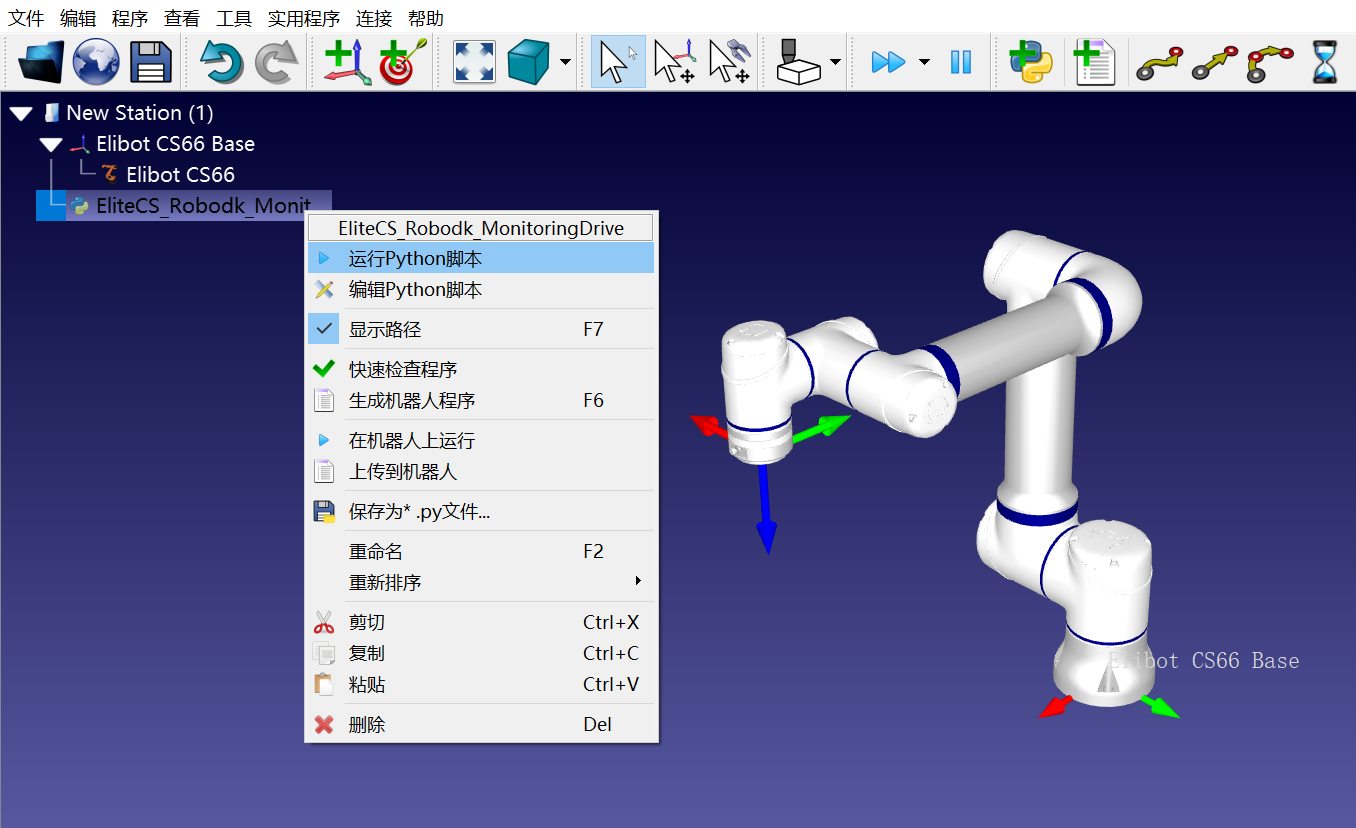
如有问题,请检查上述各参数,或选中该Python右键选择“Edit Python script” 进行检查。





