
1. Put Elibot_CS_V1.py in the Posts folder of the robodk installation directory, default path is C:\RoboDK\Posts.
2. In RoboDK, import the same CS model as the real machine, right click on the program after editing, and select "Postprocessor" as Elibot_CS_V1.

3. Select "Generate robot program".
4. Please delete them if there are comments starting with // in the generated program.

5. Copy the script to the CS robot and run.
If we use "generate *.script", which means to save the points in CS script, it will be difficult to adjust the point position directly by teaching points. On CS interface, it is easy to adjust the fixed point in the task (directly move/set the waypoint). This section mainly introduces how to export the trajectory in RoboDK to task, including under the base coordinate system and under the user coordinate system.
Note: Only MoveJ and MoveL are supported, MoveC is not supported!!!!
Put the attached Elibot_CS_TASK and Elibot_CS_TASK_Frame into Posts folder under the installation path of RoboDK (default C:\RoboDK\Posts)
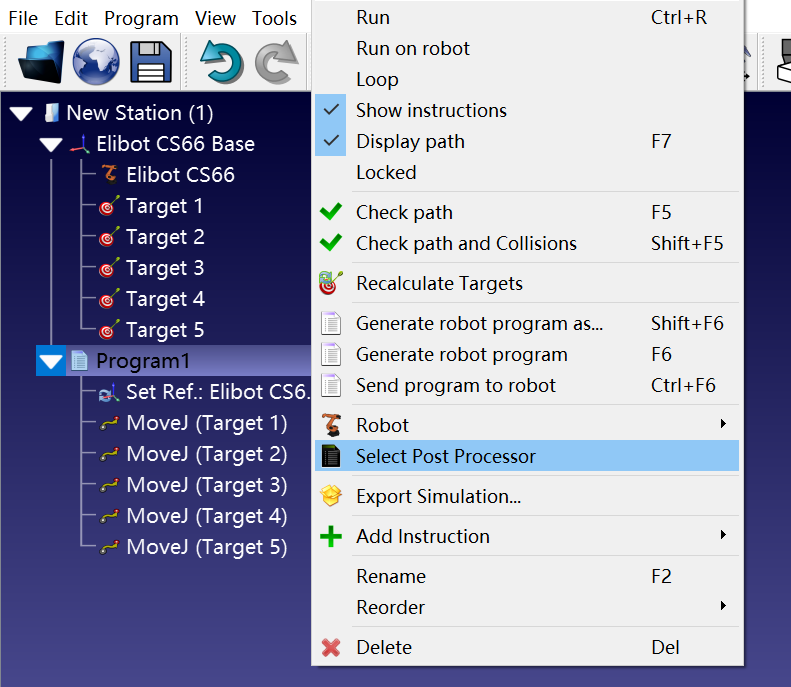
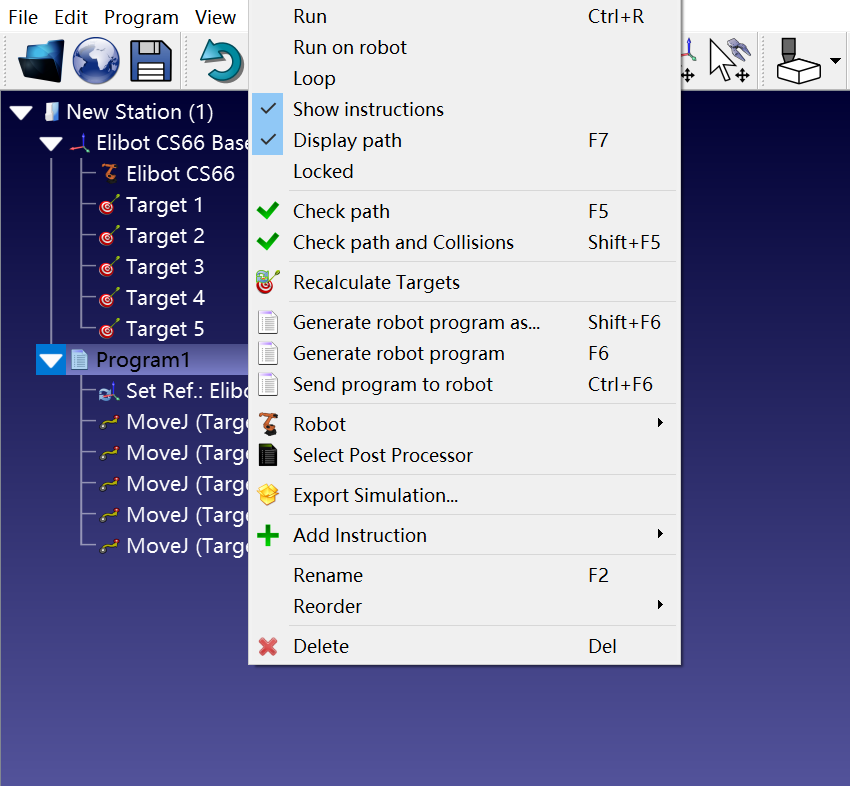
In RoboDK, import the same CS model as the real machine and create the program. Right-click on the program after editing, click "Select Post Processor", and then click "Generate robot program".

3. Copy the generated *.task file to the program folder of the CS robot and load the task.
The points generated by Elibot_CS_TASK are all automatically converted to the base of the robot, and the CS interface can show the points under the base.
4. Note: the set_tcp command has been added to the first line of the program, when the MoveL/MoveJ commands in the CS interface are converted to scripts, the set_tcp command will be re-added automatically to each line (i.e., the currently activated tcp data is re-applied to the program, which will overwrite the command set_tcp in the first line).
The points generated by Elibot_CS_TASK_Frame are based on the user coordinate User1 in RoboDK (users can directly adjust the user coordinate, meaning to adjust the difference between offline user coordinate and actual product user coordinate)
5. Note: Since the user coordinate data exists in the Configuration folder, the first time we import the task, the following error will occur. Please follow the first line of the comment, go to Configuration - Coordinate system to create a new coordinate and name it as User1 (please note the case), enter the data in accordance with the data in the comment!!!
7. Now we can run the robot program. If you need to offset the overall point position, please correct the coordinate system User1.





