外部デバイスはポート 30001 を介してモーション コマンドを送信でき、ロボットはリモート モードで動作します。
手順:
(1)リモート制御モードに切り替えて

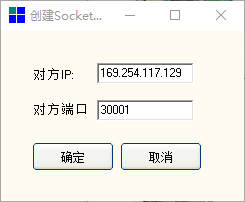
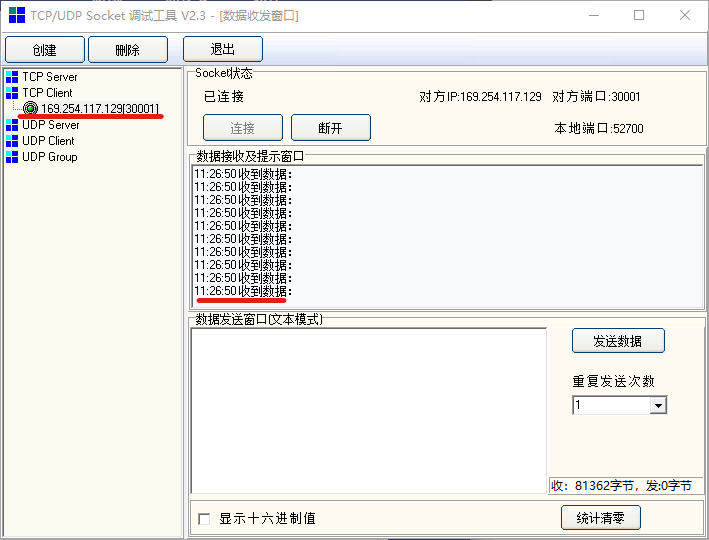
(2)Windows でSocket デバッグを開き、新しいクライアントを作成し、仮想マシンの IP、ポート 30001 を入力して、[接続] をクリックすると、ロボットは 10hz でロボットのステータス データを返します。
(3)ユーザーは、テストのためにソケット デバッグ アシスタントで次のコードを送信できます。

def a():
movej([-3.14,-1.57,-1.57,-1.57,1.57,0],a=1.4,v=0.5,t=0,r=0)
movej([-1.57,-1.57,-1.57,-1.57,1.57,0],a=1.4,v=0.5,t=0,r=0)
end
その他:
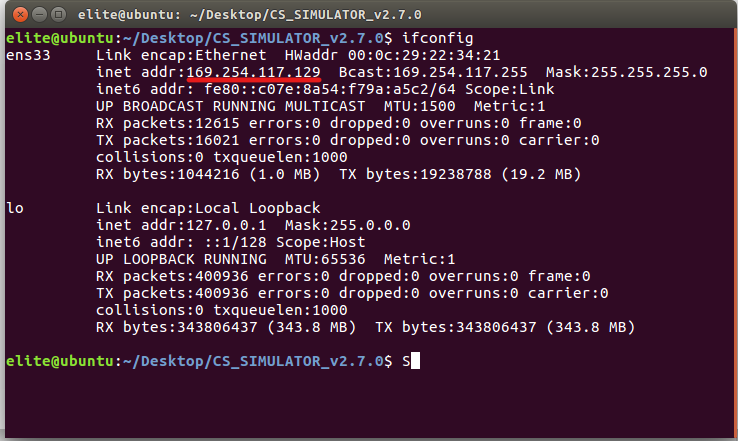
仮想マシンでスクリプトをテストする場合は、仮想マシンでターミナルを開き、「ifconfig」と入力して仮想マシンの IP アドレスを表示します。 次に、仮想マシンのアドレスを入力します。以降の操作は実マシンと同じです。
仮想マシンでターミナルを開いて ifconfig と入力すると、仮想マシンの IP アドレスを表示できます。
外部に送信されるスクリプトの形式: def で始まり end で終わる (end の後には改行が必要)、中央の内容はロボットがサポートするスクリプトです。
宿題:次のスクリプトも試してみてください。
def test(): # 最も外側の “def” には “end\n” を追加する必要があります。
# 内部のステートメントは Python の構文と同じです。
def mov():
movej([0.57636,-1.01469,-2.04816,-1.29723,1.5708,-0],a=1.4,v=1.05,t=0,r=0)
a = "hello cs"
if a == "hello cs":
mov()
end






