
使用するキーエンス PLC に対応するソフトウェア KV-Studio を開きます。
公式サイト:https://www.keyence.co.jp/products/controls/plc-building/kv-8000/models/kv-h1j-dl/

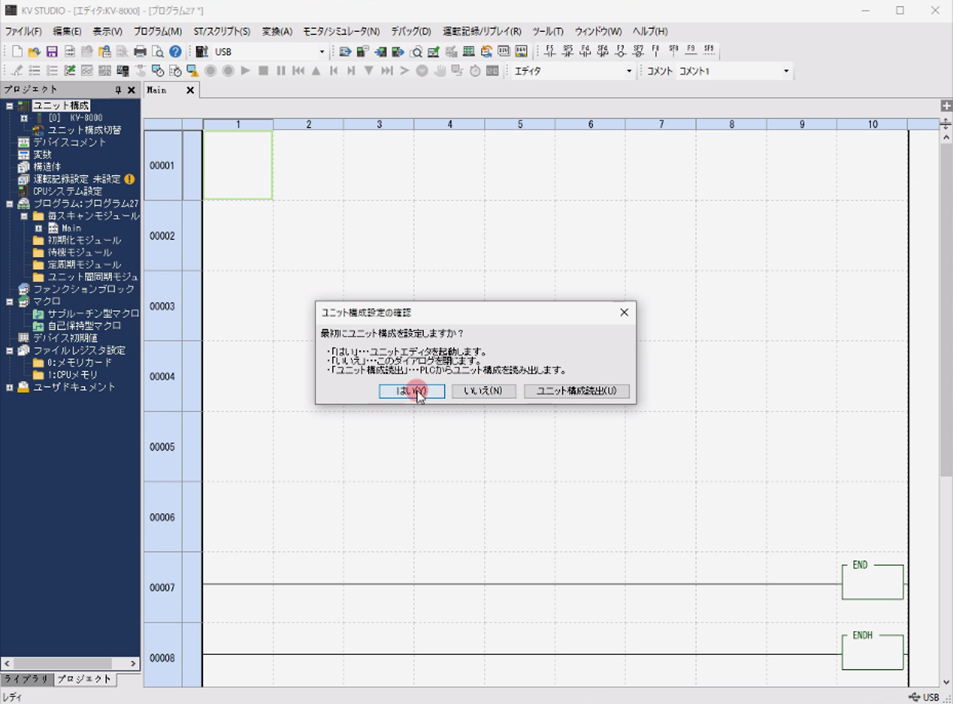
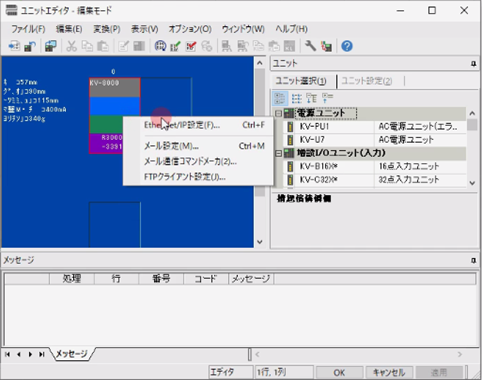
ユニットエディタを起動します
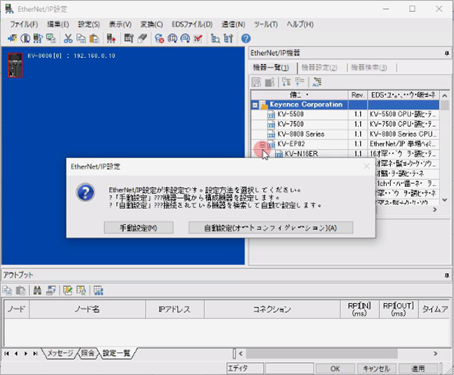
KV-8000のEtherNet/IPを設定し、手動で設定する(KV-8000 のアイコンを右クリックし、「EtherNet/IP」を選択します。)
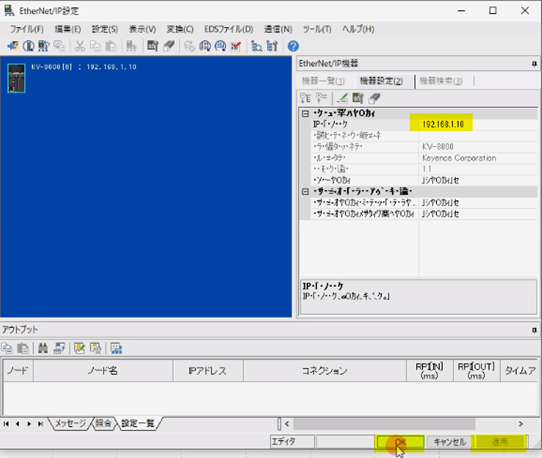
下の図のように右側で、IP アドレスを PLC の IP アドレス (ロボットと同じネットワーク セグメント上にある必要があります) に設定し、変更が完了したら [適用] をクリックし、[OK] をクリックする。
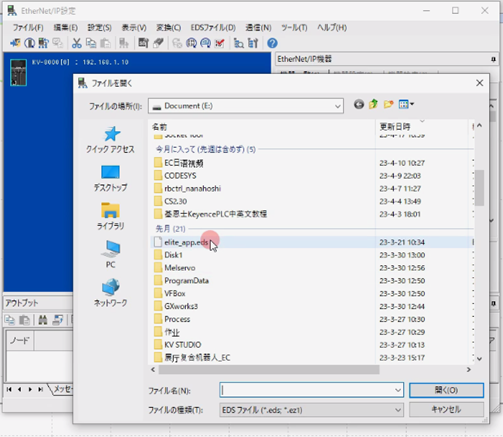
メニューバーの「EDSファイル」-「登録」を選択し、ローカルのエリートロボットECシリーズのedsファイルを見つけて「開く」をクリックする。
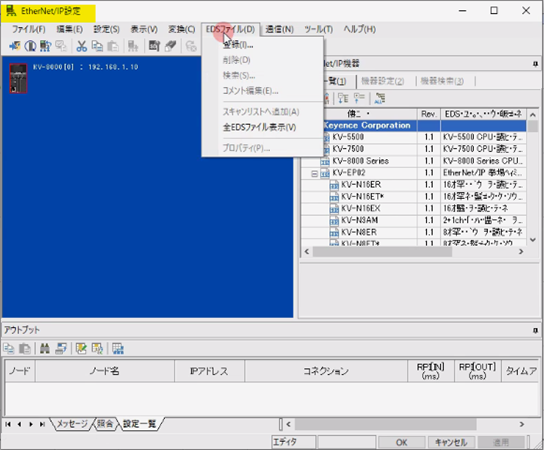
ECシリーズのeds(ダウンロード:https://drive.google.com/drive/folders/1g3TYKIjzj94ymYWKx2sj1DaYIQsB8JYZ)
ECシリーズは、右側の [デバイス名] リストに自動的に表示されます。これをドラッグして、左側の PLC に追加します
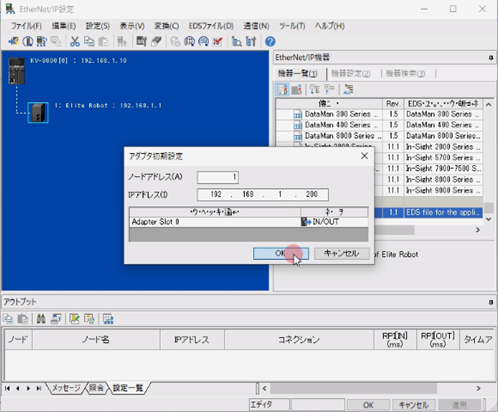
「アダプタ初期設定」窓はポップアップし、IPアドレスを実際に接続しているロボットのIPに設定し、「OK」をクリックし、変更が完了したら [適用] をクリックし、[OK] をクリックする(2箇所の)。
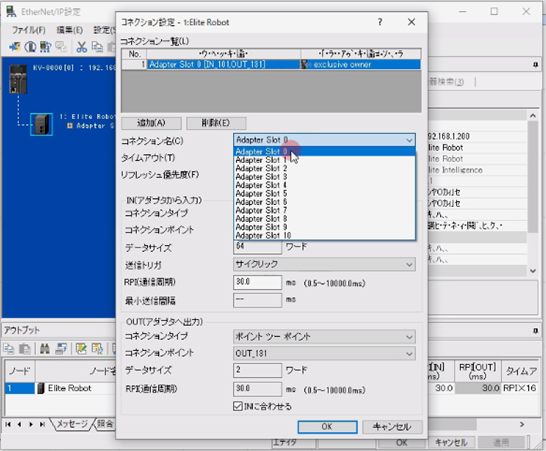
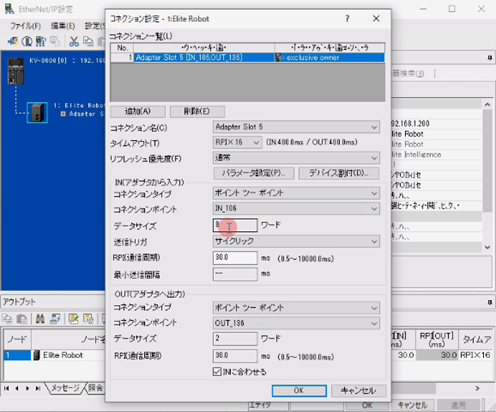
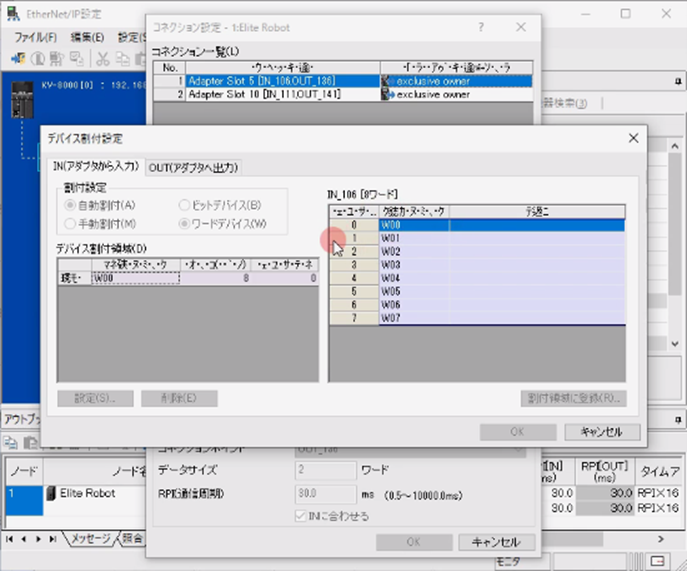
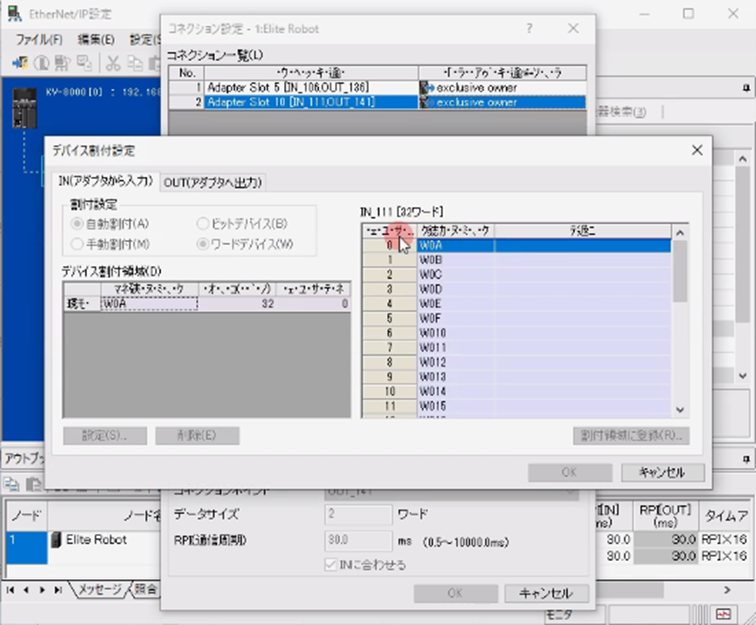
この時点で、必要なデータに対応するスロットを追加できますが、開始位置の確認を忘れないように注意してください。
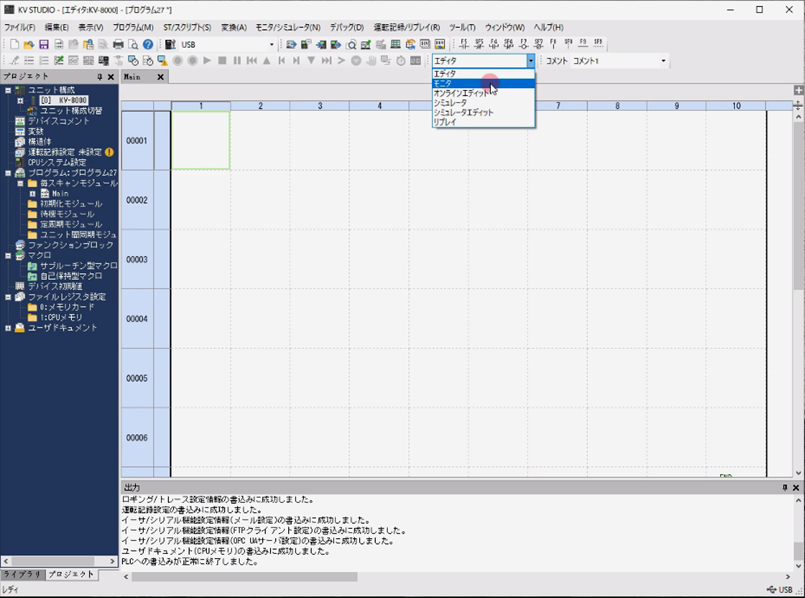
スロットを追加したら、PLC転送し、モードを監視モードに切り替える。 以下に示すように:
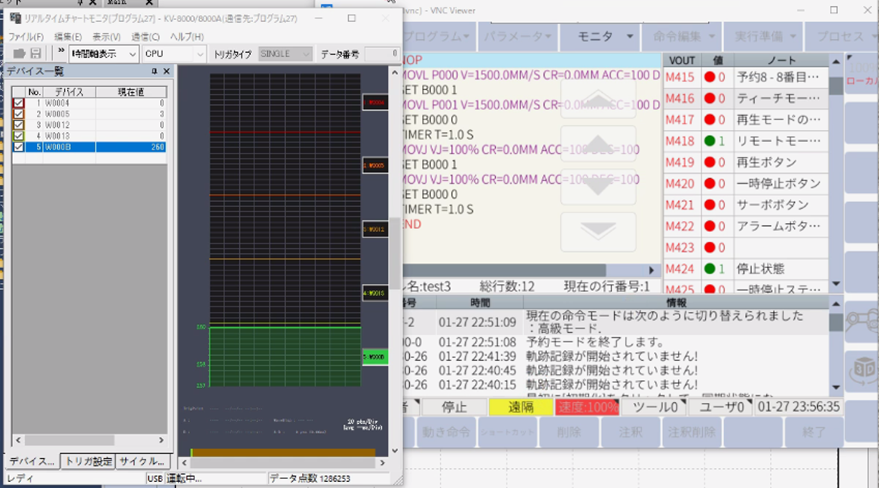
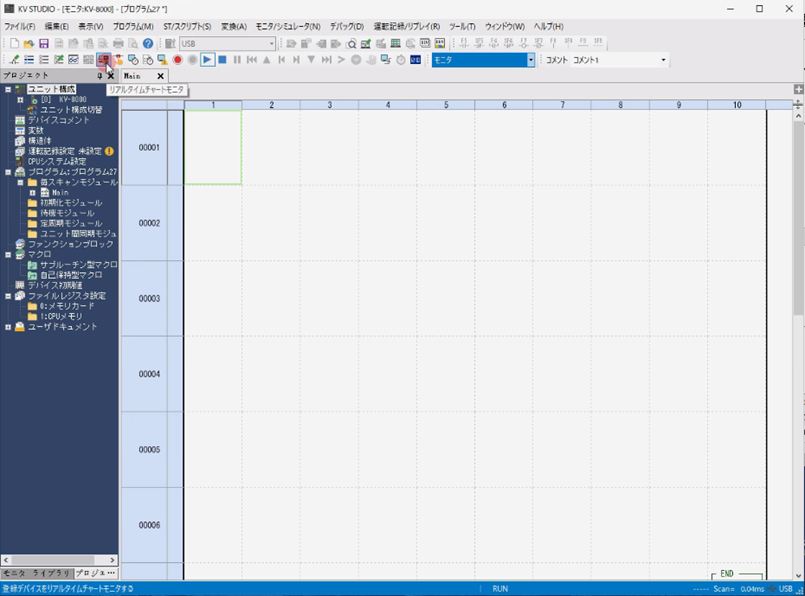
後で「リアルタイムチャートモニタ」をクリックし、デバイスを構成し、「トレス開始」をクリックし、選択値はすぐに示されている。

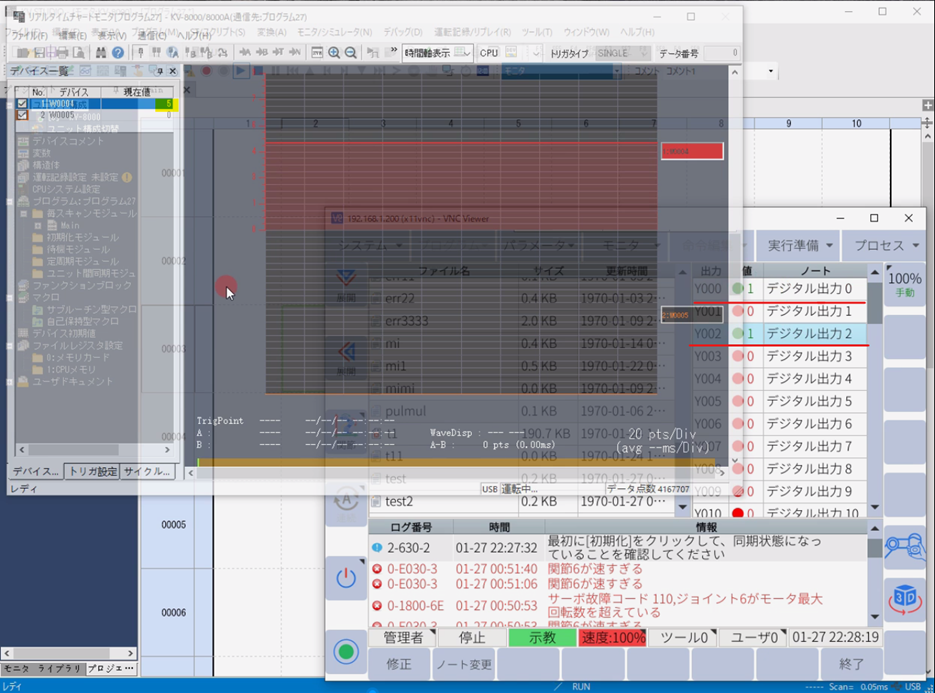
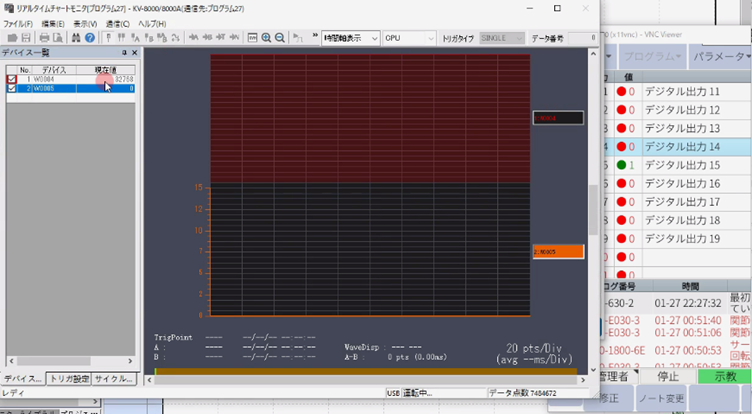
W000Bは、M431 ~ M416 の 16 ビットの 2 進数から 10 進数への値に対応する。(この時ロボットは停止しているM424=1)
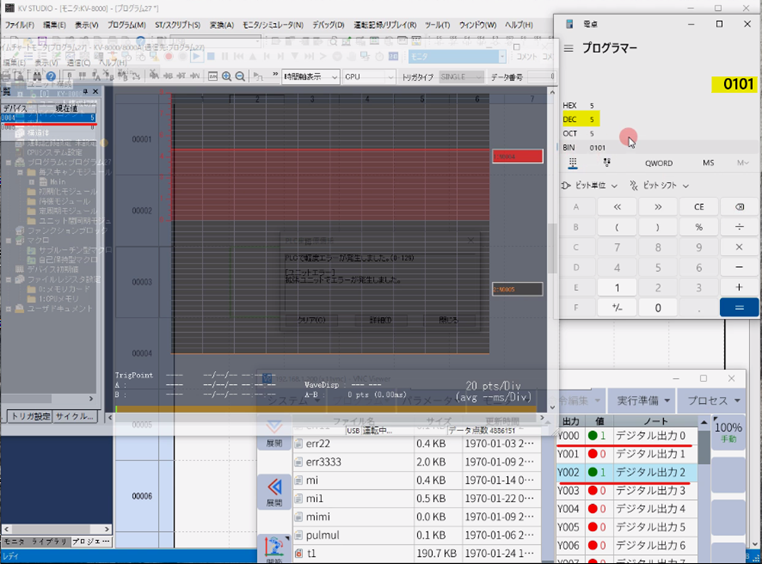
教示モードで(M416=1)、0000 0001 0000 0001
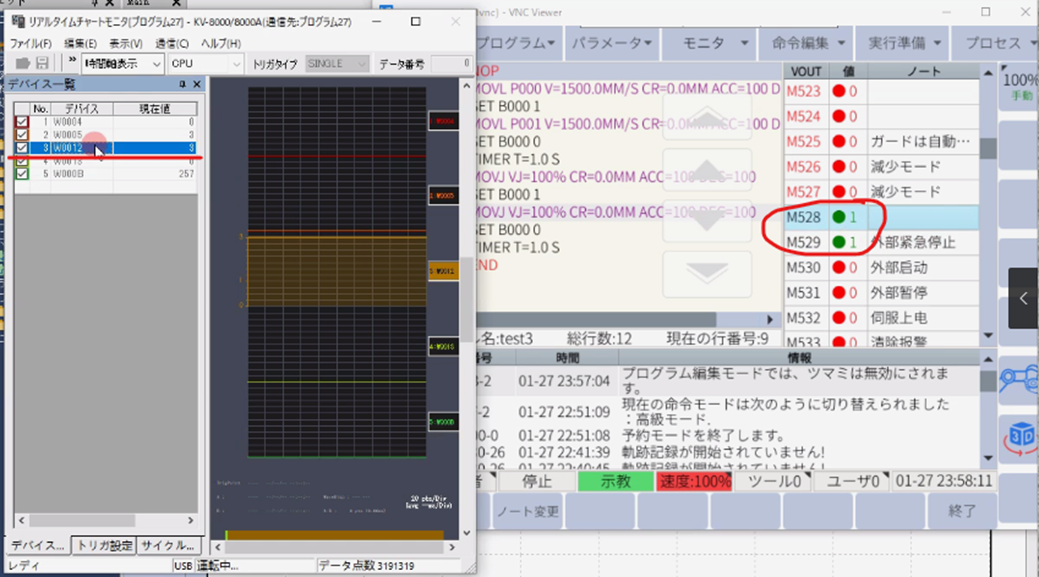
PLAYモードで(M417=1)、0000 0001 0000 0010
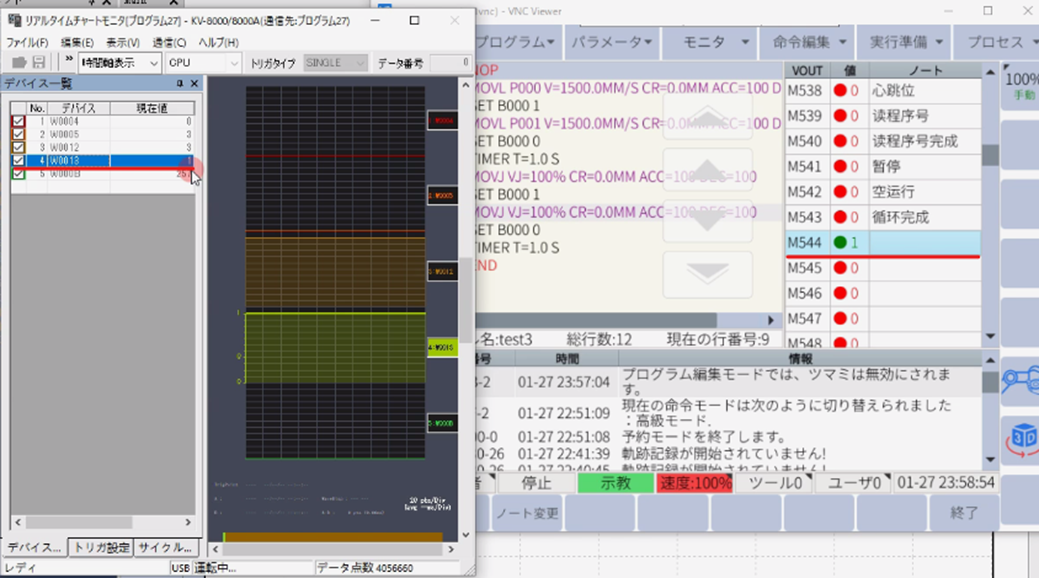
遠隔モードで(M418=1)、0000 0001 0000 0100