CSシリーズロボットは、リモートモードで外部信号によるプログラムの起動をサポートします。 詳細な構成手順は次のとおりです:
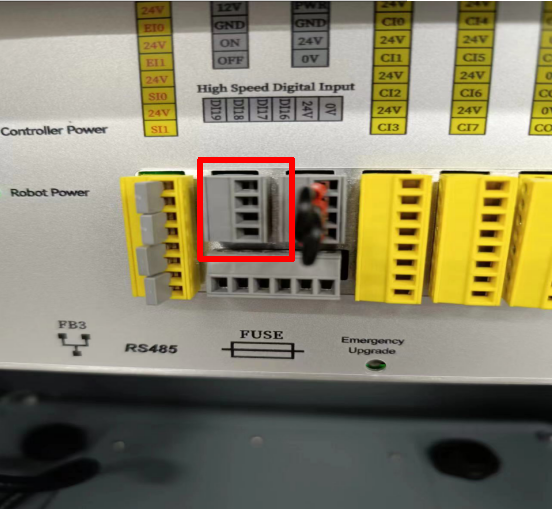
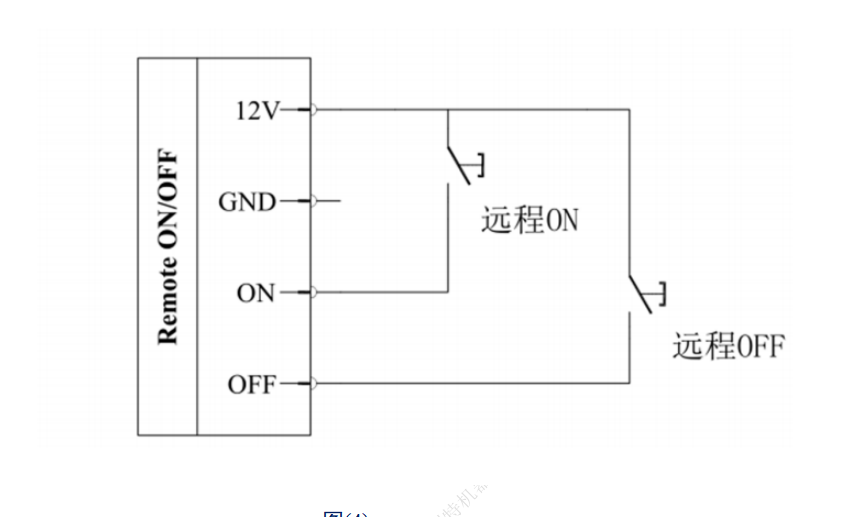
リモートモードでコントローラのを接続する方法:
"12V"と“ON”を接続すればリモートモードの電源を入れます。
"GND"と“OFF”を接続すればリモートモードの電源を切ります。
 これより
これより
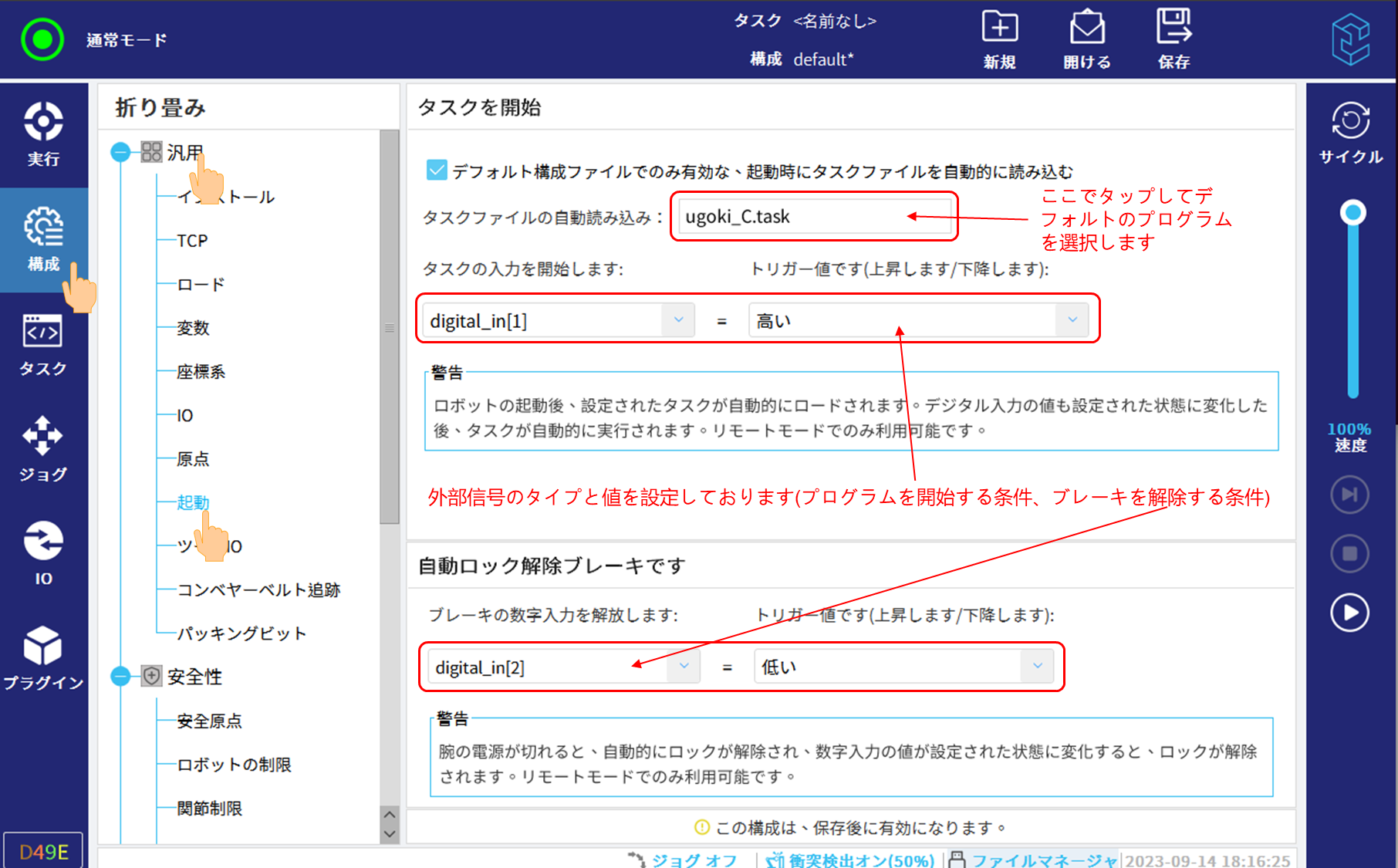
デフォルトのプログラムを選択してから、外部信号を関連付けます。これにより、外部信号からデフォルトのプログラムが実行されます。外部信号はデジタル入力、設定可能な入力、入力ブールレジスタ三つのタイプをサポートしています。下の図のようにデジタル入力タイプの外部信号を利用している。
2箇所の設定を完了すれば、ティーチングペンダントのメニューバーで“保存”をタップして、“すべて保存”をタップしてすべてを保存してください。(切要)
動画通りに設定してください。
色々な設定を完了した後、ティーチングペンダントのメニューバーで“保存”をタップして、“すべて保存”をタップしてすべてを保存してください。(切要)
ロボットを再起動して、外部信号を順番に(ブレーキを解除、プログラムを開始)発送しから、ロボットが運転される。
動画のリンク:GoogleDrive






