
以下に示すように、逆運動学解の計算時にシステムがエラーを報告することがあります。つまり、デカルト空間から関節空間への変換が失敗します。

get_inverse_kin_has_solution命令は、get_inverse_kin に解があるかどうかを確認し、get_inverse_kin に解がない場合に実行時アラームがトリガーされるのを避けるためにブール結果 (True または False) を返すために使用されます。
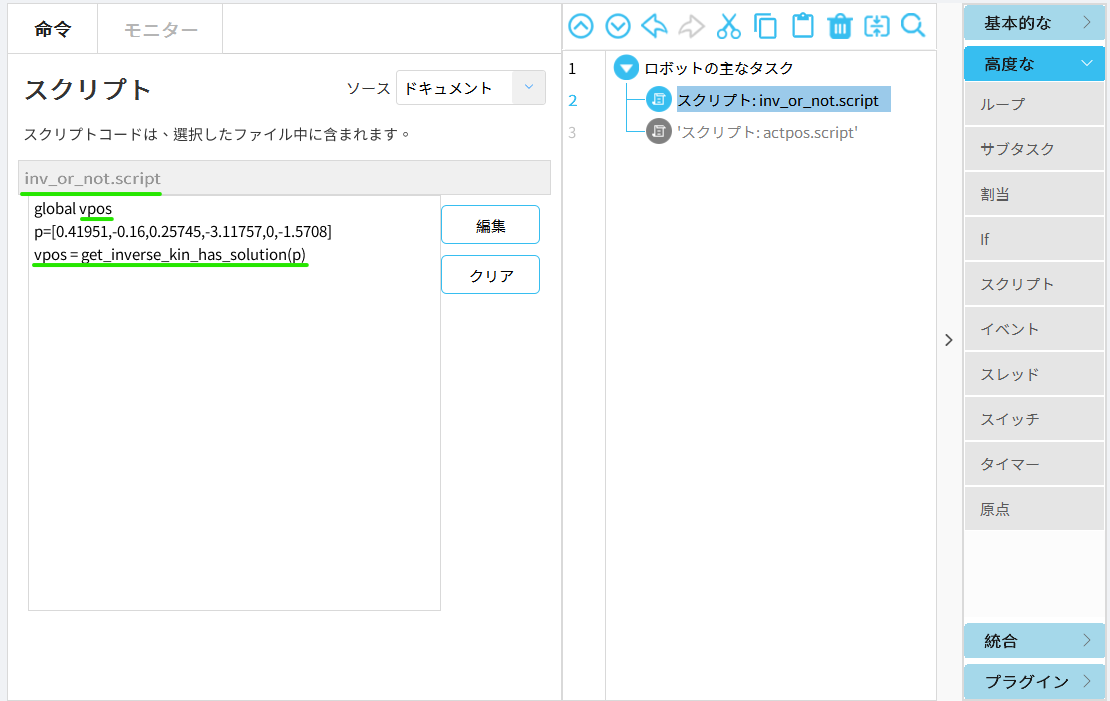
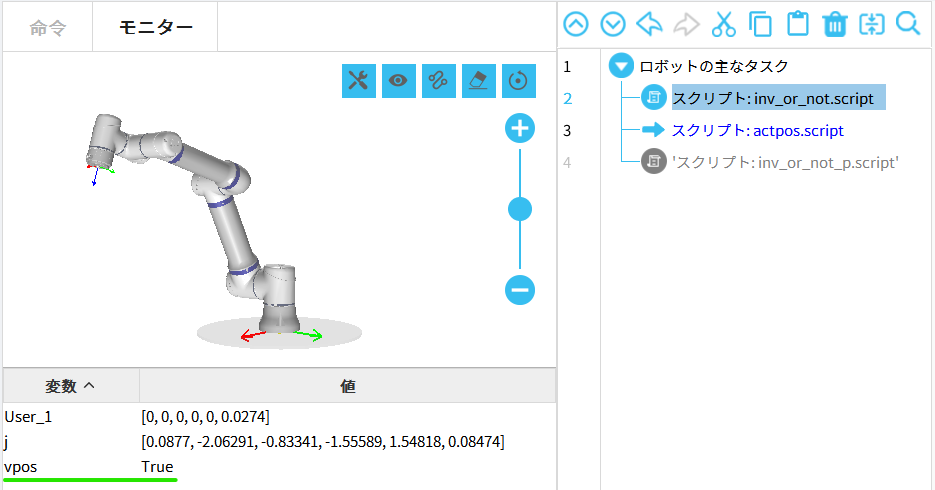
①Trueの例:
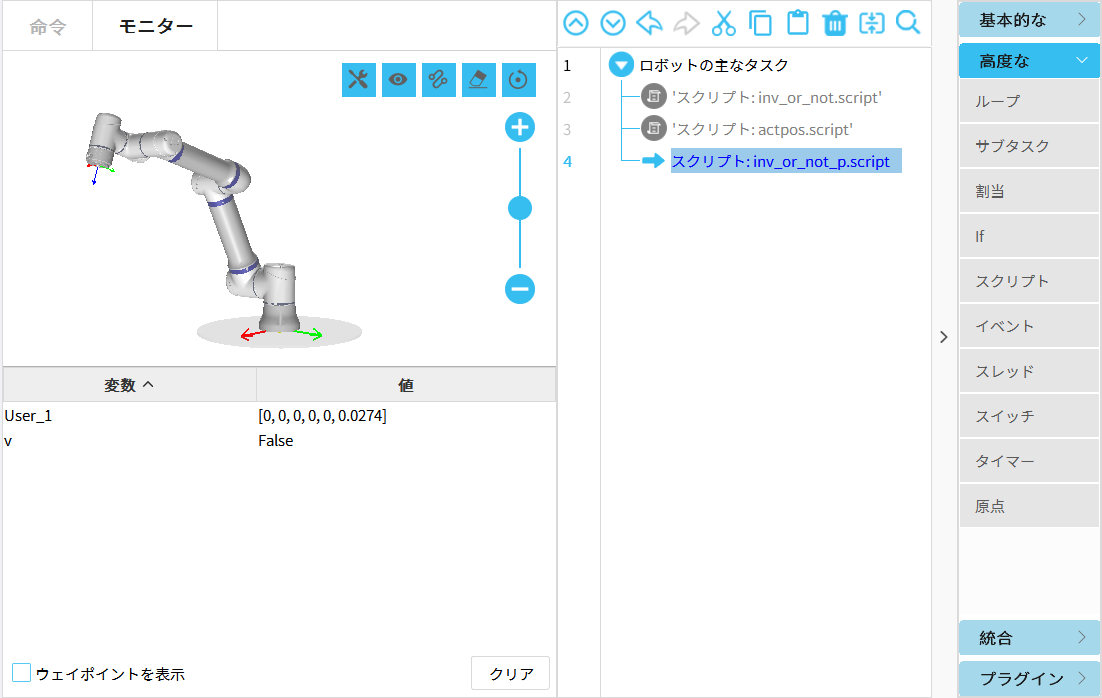
②Falseの例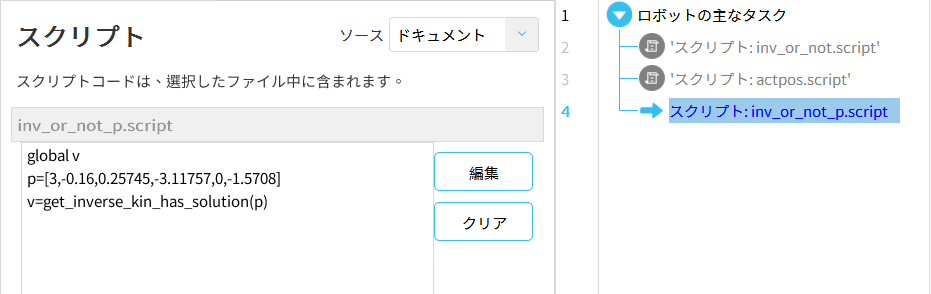
引数:
p: ポーズ。形式は [x, y, z, Rx, Ry, Rz] です。リスト タイプのデータ。x、y、z の単位は m、Rx、Ry、Rz の単位は rad です。
qnear: 最も近い関節角度。デフォルト値は現在のロボット関節角度です。配列 タイプのデータ (オプションのパラメーター)。
tcp: ツールの形状。デフォルト値はシステムの現在アクティブなツールです (オプションのパラメータ)。
戻り値:
ブール値データ、True または False。
コードの例:
global v
p=[0.41951,-0.16,0.25745,-3.11757,0,-1.5708]
v=get_inverse_kin_has_solution(p)
print(v)
引数:
p=po=[ 0.41951,-0.16,0.25745,-3.11757,0,-1.5708]
戻り値:True





