プラグインのダウンロード:
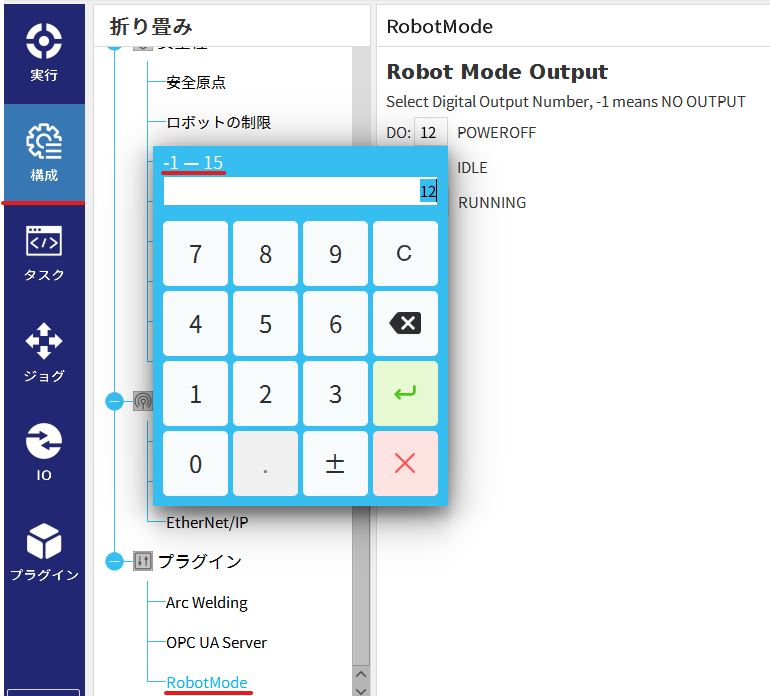
出力信号を設定する場合、対応する数字にデジタル出力 DO0 ~ DO15 を選択できます。
"-1"が維持されている場合は、まだ設定されていないことを意味します。
POWEROFF : ロボットの電源が入っていません
IDLE : ロボットの電源を入れた後、ブレーキが開いていない場合: アイドル状態
RUNNING : ロボット ブレーキが完了しました (ここでrunning はロボットの状態のみを表し、タスクの実行状態を表しません。)
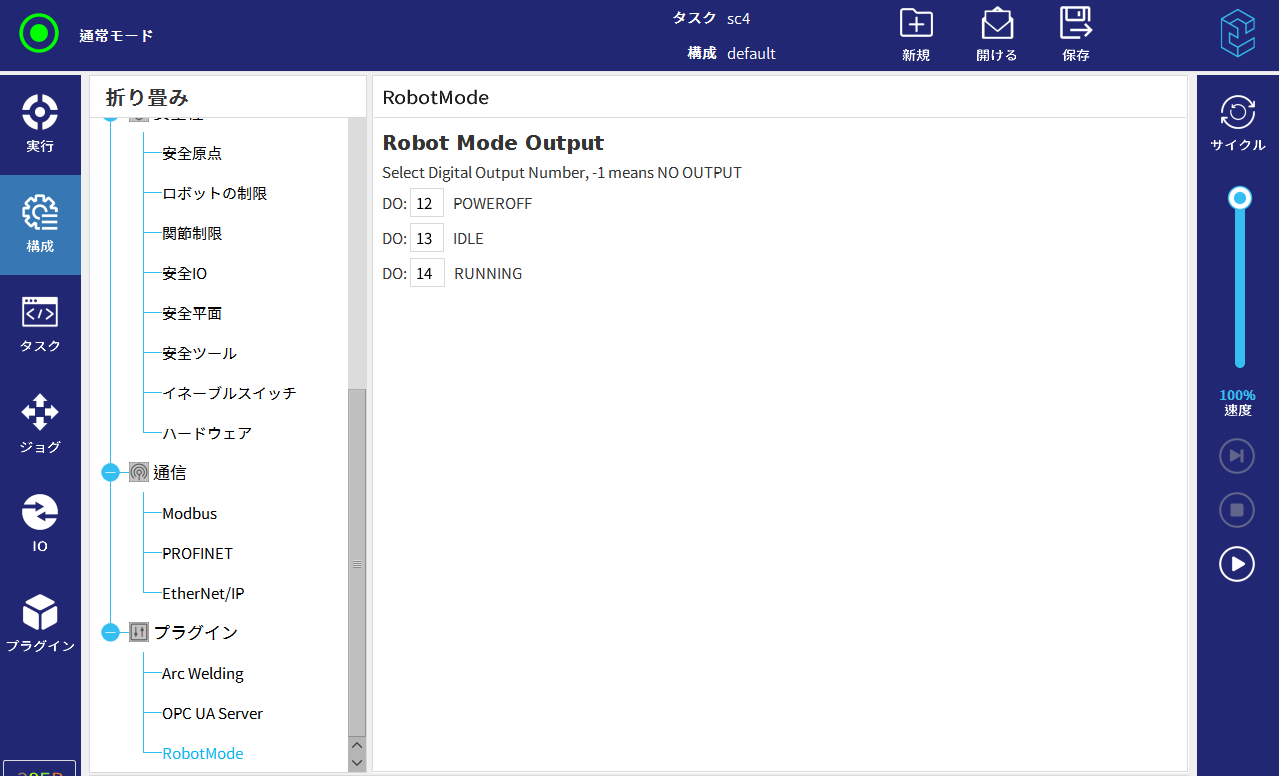
対応する DO を設定した後ロボットは対応する状態になり、IO モニタリング ページで、対応する信号が 1 に設定されます。
下の図のようにロボットは通常モードになり、DO14の意味はRUNNINGですので、有効になる(DO14の処青い丸できます)

PS:
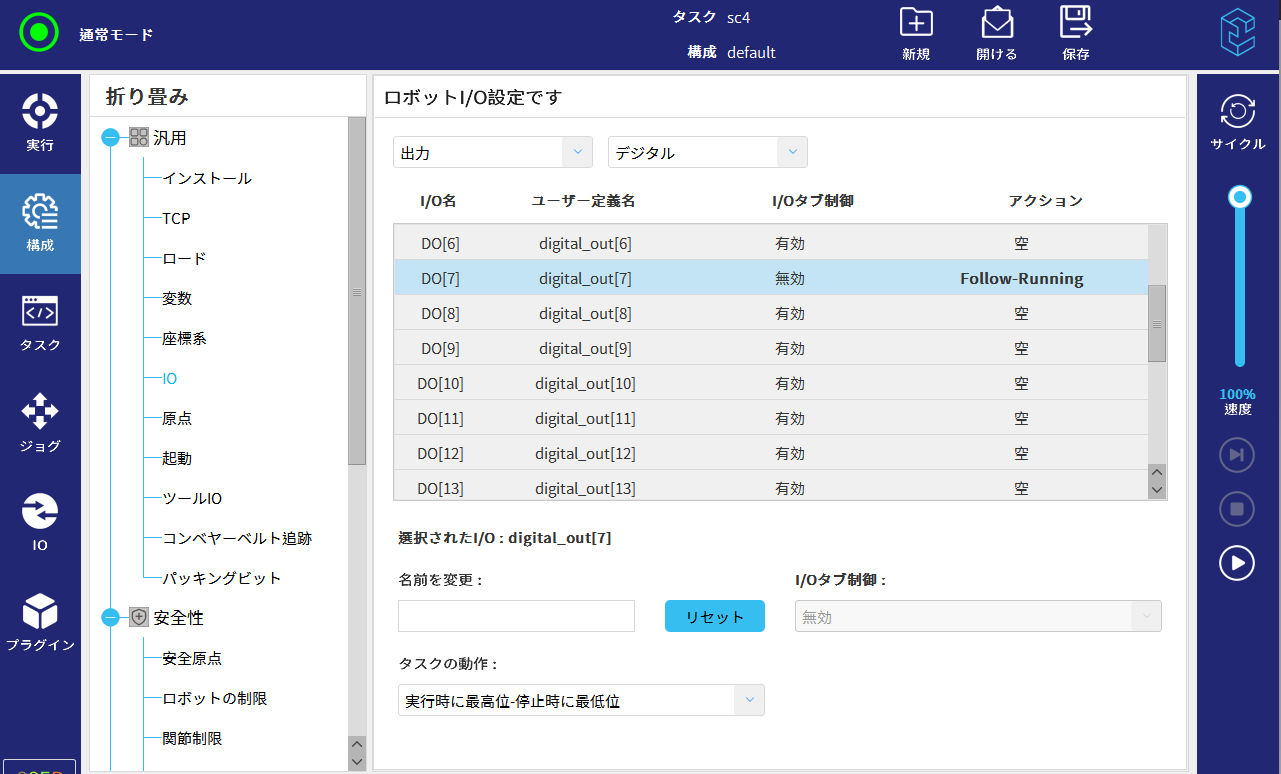
タスクの実行状態をデジタル出力に設定のは、下図のよう構成できます。