
RoboDKでは、CSの動きやCS仮想マシン上の動きをリアルタイムに監視することができます。
CS ドライバー スPython クリプト ダウンロード:
https://drive.google.com/drive/folders/1i8eGUB4wOm-SoPEg2-C5LscBoWnjXnwz


RoboDK と実機 RoboDK とシミュレーター
手順は下記の通り:
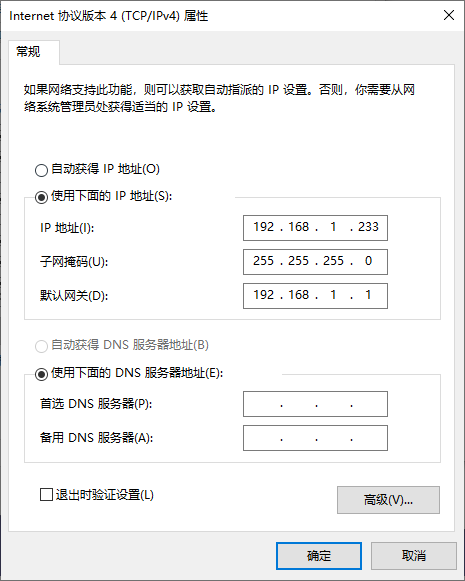
1. PC の IPv4 とロボット FB1 の IP アドレスを同じネットワークセグメントに設定します。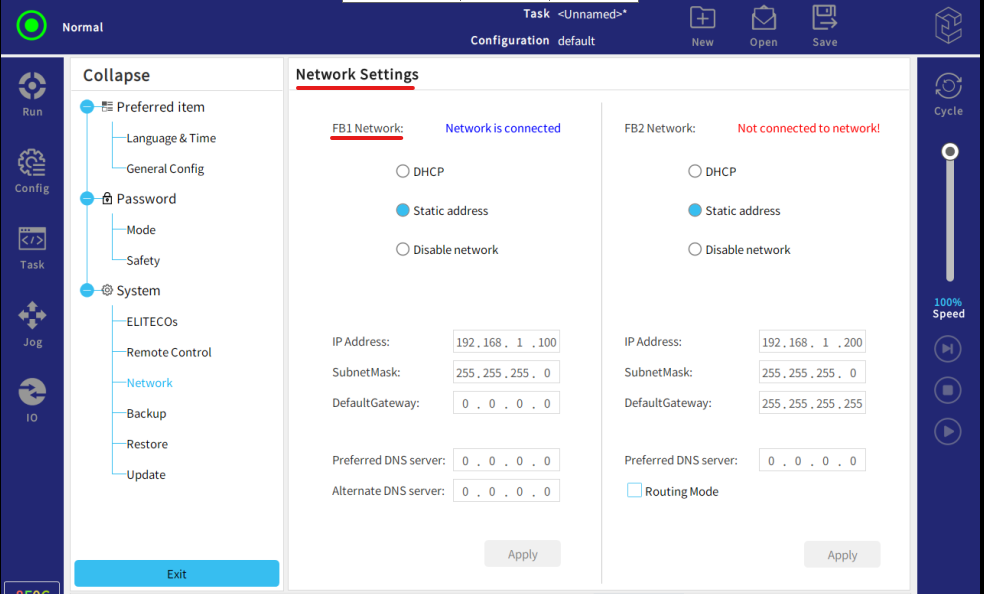
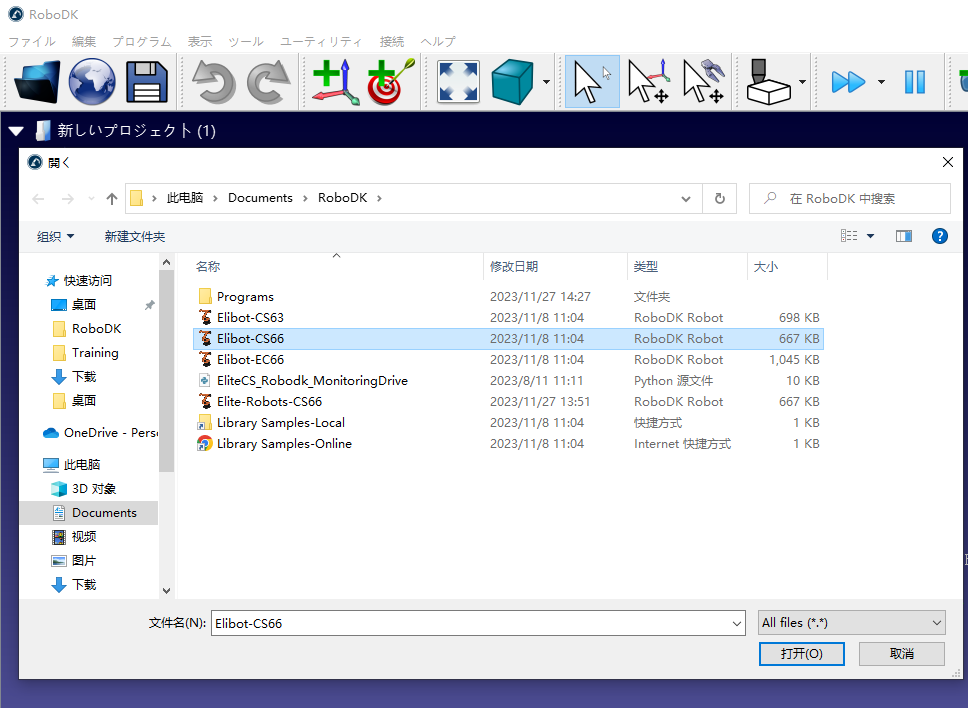
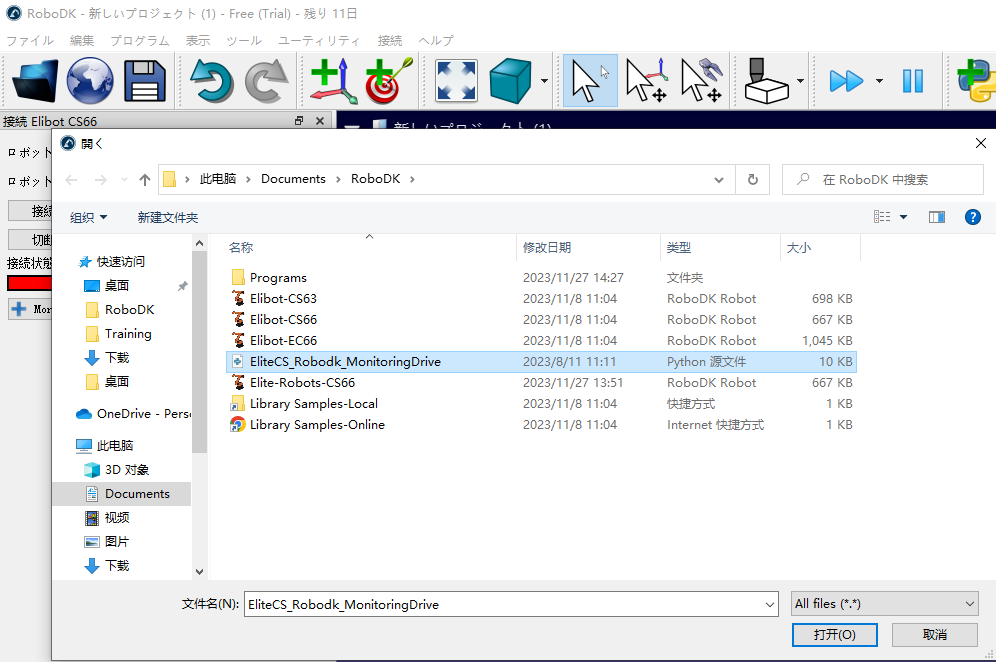
2. CS モデルを RoboDK にインポートします。 RoboDK ソフトウェアを開き、[新しいプロジェクト] をクリックし、左上隅の [開く] をクリックします。実際の CS ロボット モデルと一致するロボット モデルをインポートします。[開く] をクリックします。
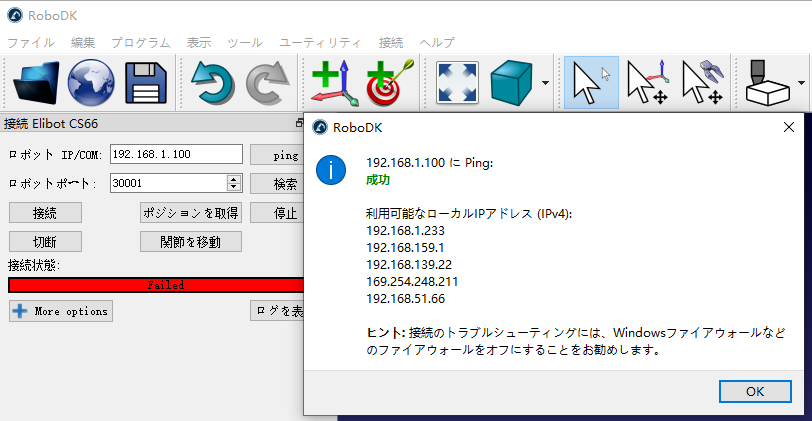
3. メインメニューの「接続」-「ロボットの接続」をクリックし、左側にある実際のCSロボット(CS仮想マシン)のIPアドレス(FB1)、ポート番号を30001と正しく入力し、「ping」をクリックします。接続できるかどうかをテストします。 「成功」と表示されるので、「OK」をクリックしてウィンドウを閉じます。

4.CS ドライバー スPython クリプトをインポートして実行します。ファイル名は:EliteCS_Robodk_MonitoringDrive.py
Python を選択した後、右クリックして「Python スクリプトを実行」を選択すると、RoboDK 内の CS モデルが CS 実機と同時に実行されます。
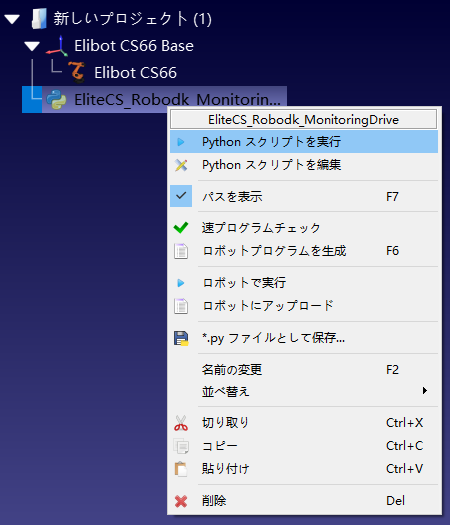
タスクを実行すれば、RoboDK 内の CS モデルが CS 実機と同時に実行されます。






