CS ロボットは RoboDK シミュレーションをサポートしており、RoboDK の CS モデルをドラッグすると、実際のロボットが対応する位置まで動作します。
CS リモート制御 ドライバー のダウンロード:
https://drive.google.com/drive/folders/1hxe-AujRqXFDDIPmuHUuer9De43WqvLk
手順は下記の通り:
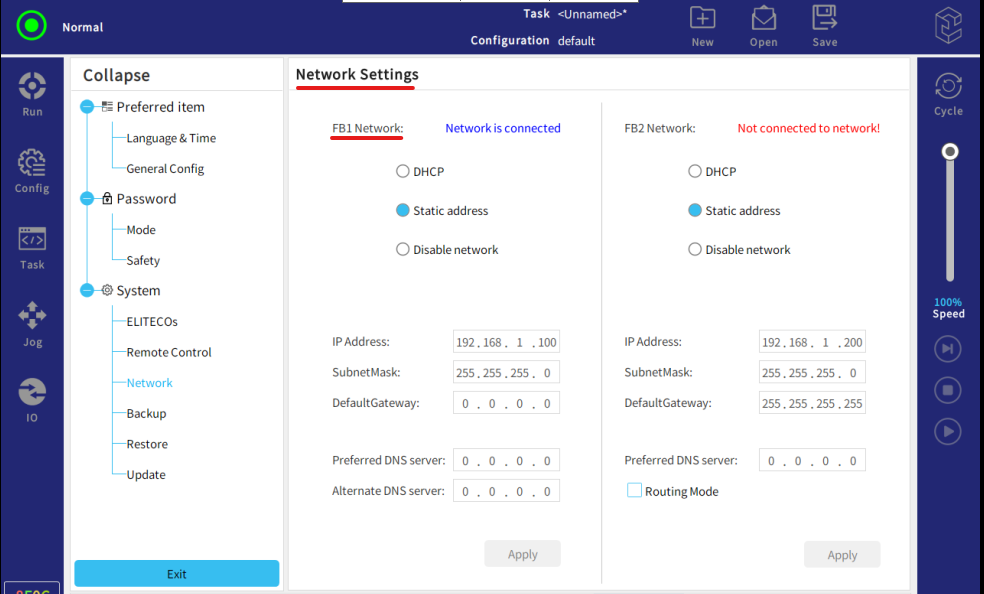
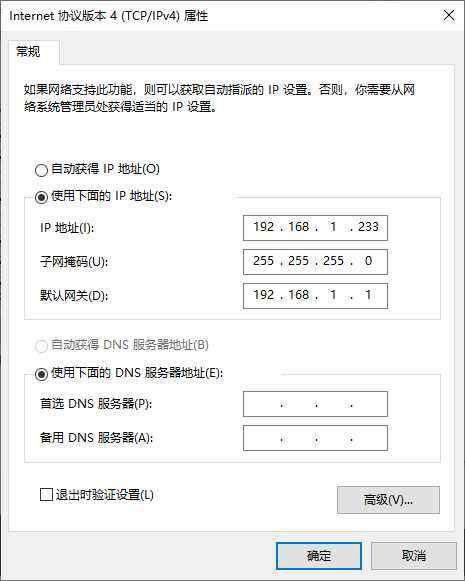
1. PC の IPv4 とロボット FB1 の IP アドレスを同じネットワークセグメントに設定します。
2. CS モデルを RoboDK にインポートします。 RoboDK ソフトウェアを開き、[新しいプロジェクト] をクリックし、左上隅の [開く] をクリックします。実際の CS ロボット モデルと一致するロボット モデルをインポートします。[開く] をクリックします。


3. ElibotDriver.py を RoboDK インストール パスの \api\Robot フォルダーにコピーします (ここで: D:\RoboDK\api\Robot)

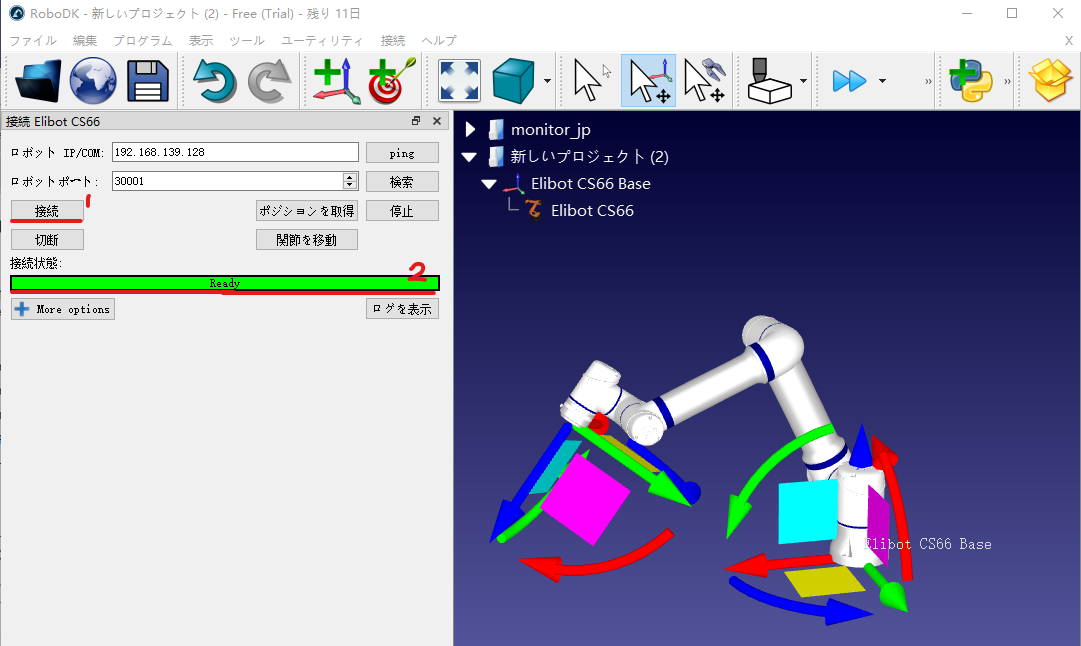
4. メインメニューの「接続」-「ロボットの接続」をクリックし、左側にある実際のCSロボット(CS仮想マシン)のIPアドレス(FB1)、ポート番号を30001と正しく入力し、「ping」をクリックして、「成功」と表示されるので、「OK」をクリックしてウィンドウを閉じます。

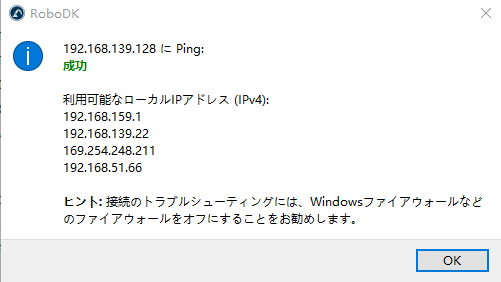
接続できるかどうかをテストします。
7.ロボットをリモート制御に切り替えます。
8.マウスの矢印を座標系のマウスの矢印に切り替えると、RoboDK モデルを自由にドラッグして実機を同期して動かすことができます。