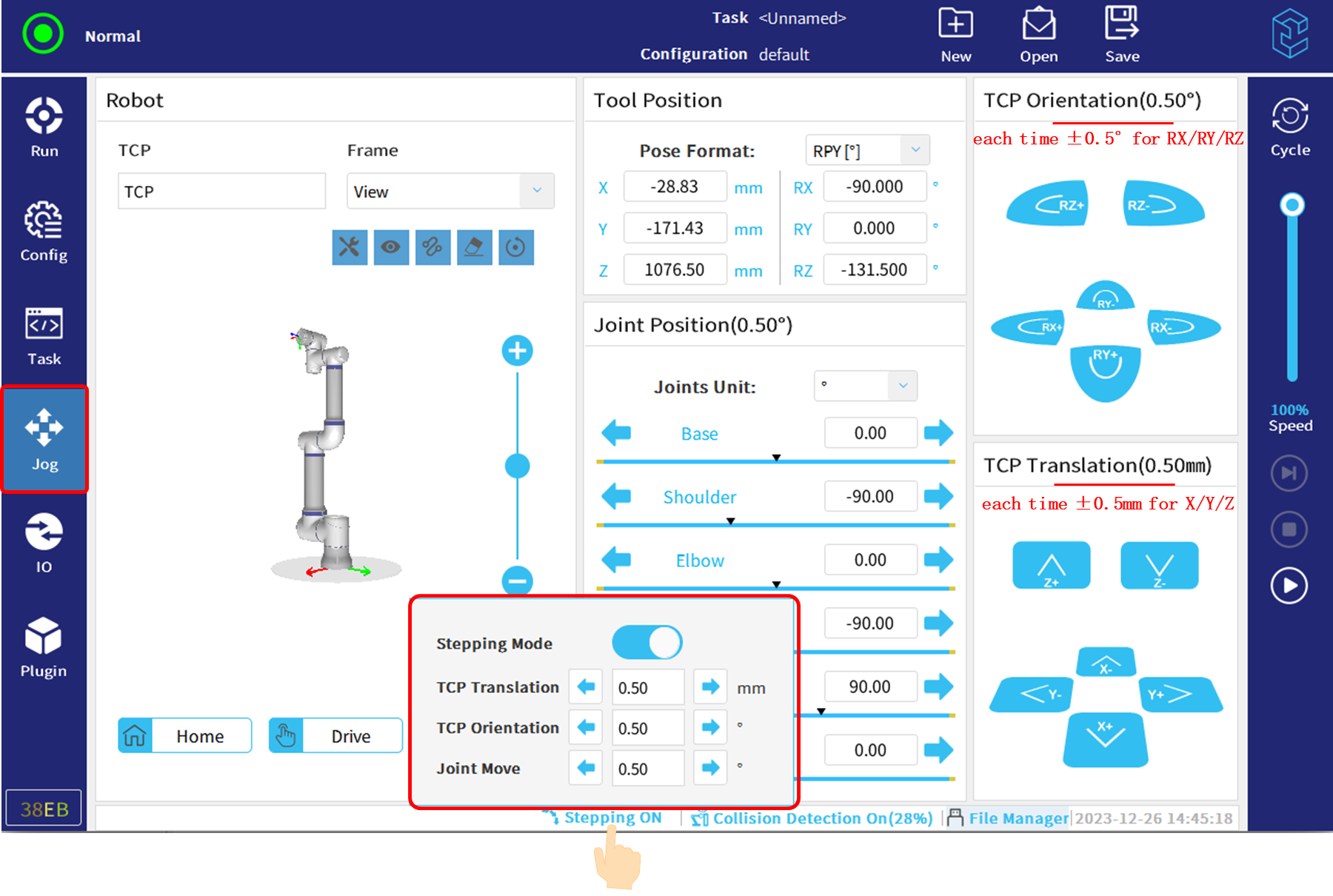
CS provides a more convenient debugging function, that is by continuously pressing any direction of x,y,z generates a position offset of 0.5 mm(Setting number) when the robot stops moving. Or a rotation offset of 0.5°(Setting number) is generated when pressing any direction of rx,ry,rz.
Route: "Jog" on the left side of the teaching pendant ➞ "Stepping ON" at the bottom
Ps:
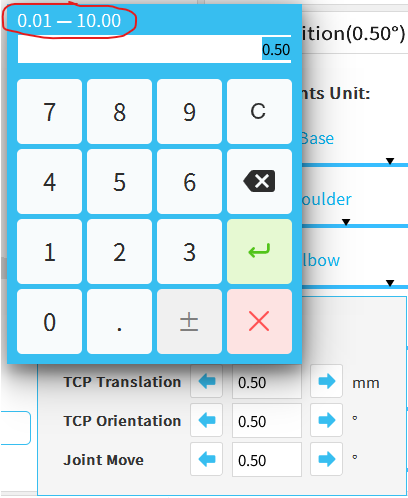
the number could be adjusted from 0.01~10.00, unit: mm or degree