当 CS66A/CS66AZ 机器人的关节满足以下一个或几个条件的时候,机器人会发生奇异, 可归纳分为以下三类:
1. 腕部奇异,关节 4 和关节 6 的轴线平行时发生奇异。


上图分别为 CS66A 和 CS66AZ 连个型号的机器人在关节 4 和关节 6 平行时奇异的某个 位置。
2. 肘部奇异,关节 2,3,5 这三个关节共面或者接近共面的时候发生奇异。
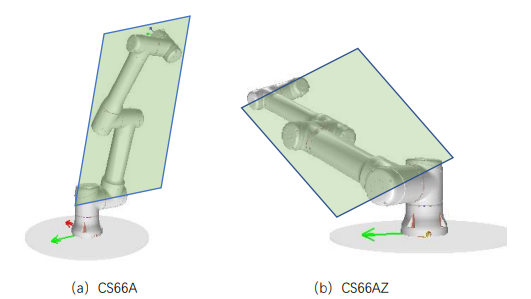
上图分别为 CS66A 和 CS66AZ 连个型号的机器人的两个肘部奇异位姿
3. 肩部奇异,关节 5、6 的交点在关节 1 轴线与关节 2 轴线决定的平面内或靠近这个平面 的时候发生奇异
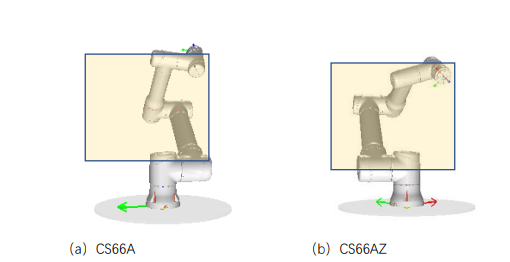
上图分别为 CS66A 和 CS66AZ 连个型号的机器人的两个肘部奇异位姿示例







