CS series support both MODBUS TCP and MODBUS RTU communication,which is the same as EC series.
This post describes how to use MOSBUS TCP, a shielded and twisted pair RS485 cable is used.
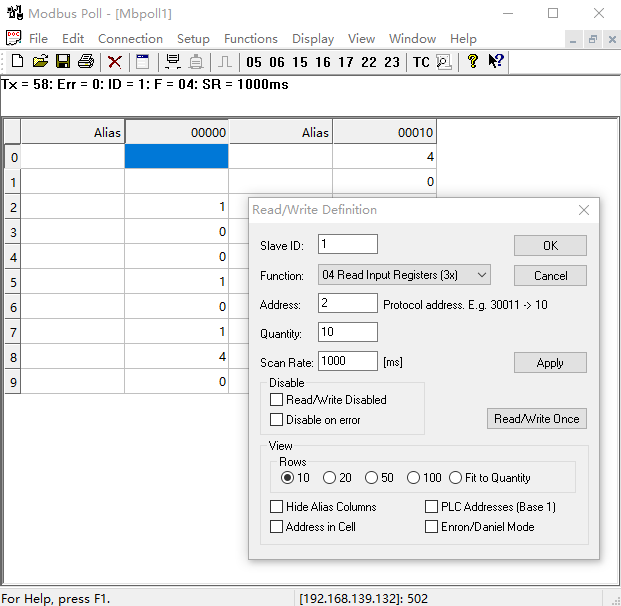
(1) When the robot acts as slave/Sever and listens to the host computer to send instructions. Here we use Mobus Poll software which is installed in the PC in advnaced. Modbus Poll Download link: https://www.modbustools.com/download.html
Like pictures below, create a read registers window as monitor, and then write single regitsrers (value: 8)in the popuped small window.
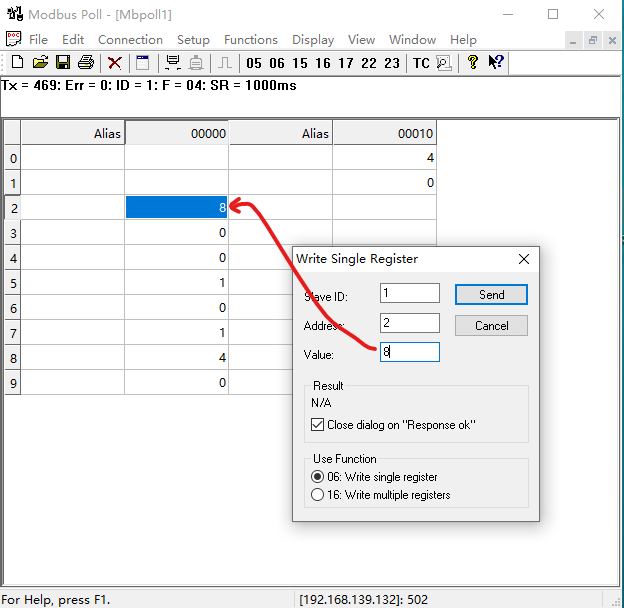
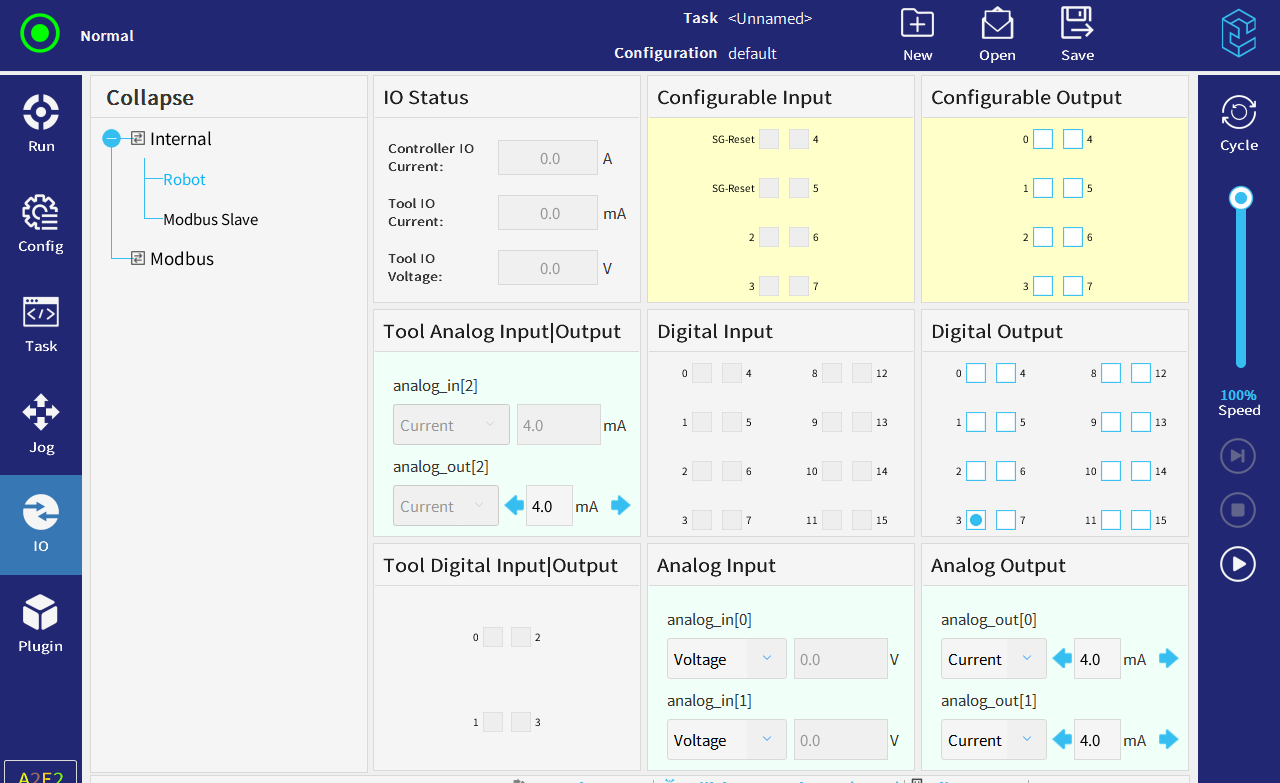
The robot will receive the signal and react as below: as 8 euqals the third power of 2, so the digital output 3 is in high level status.
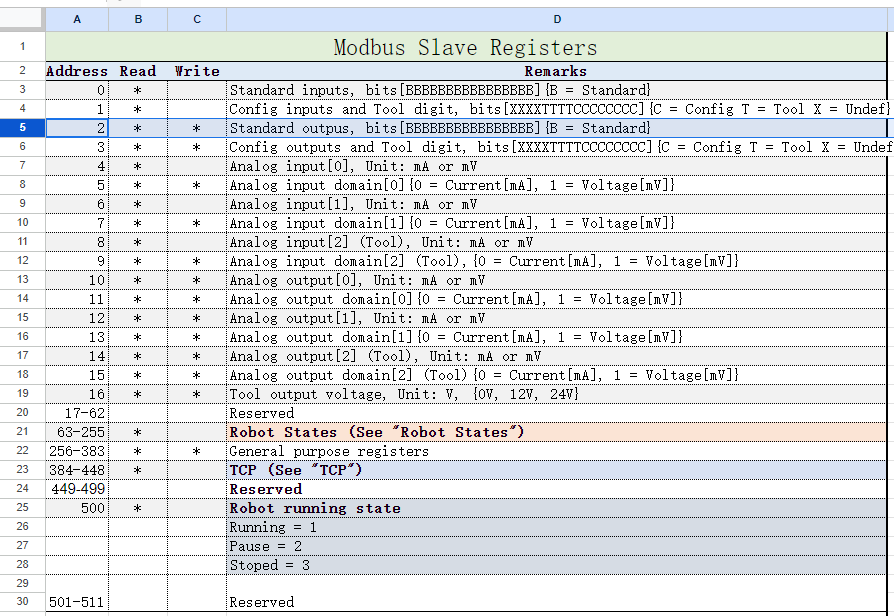
There is a modbus slave sonfiguration table of CS series for details look up, like what address registers store what type of data for the robot.
Download link:https://docs.google.com/spreadsheets/d/1SWsV-hob-WnIGQ7Pm5p-JwZKJojAmPpy/edit?gid=827335106#gid=827335106 )
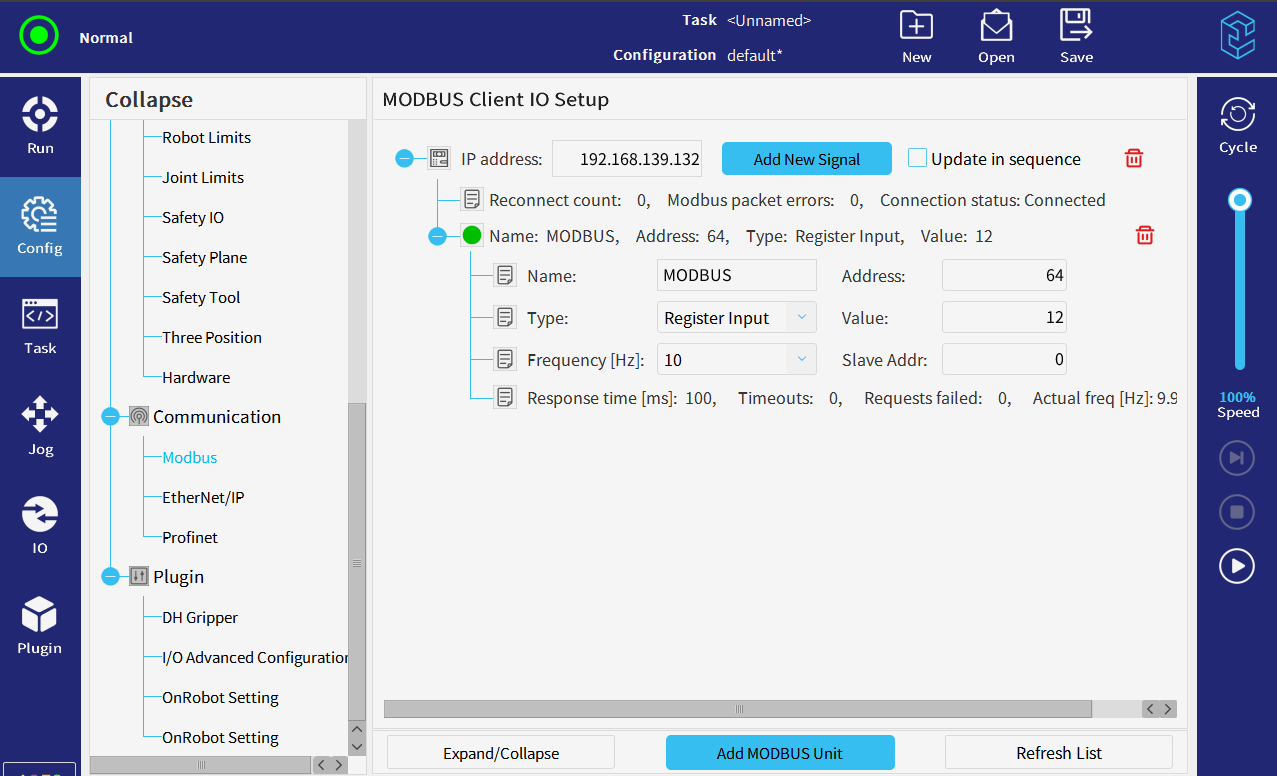
(2) When the robot acts as master/Client, it suggest to change to the built-in interface of the CS teach pendant.
Just input the the IP address and configure the address of the external device, then users will get the data accodringly, like read and write the values.
Add the MODUS unit from "Config" tab, select the "Modbus" under the "Commnunication" node,

Write the value.
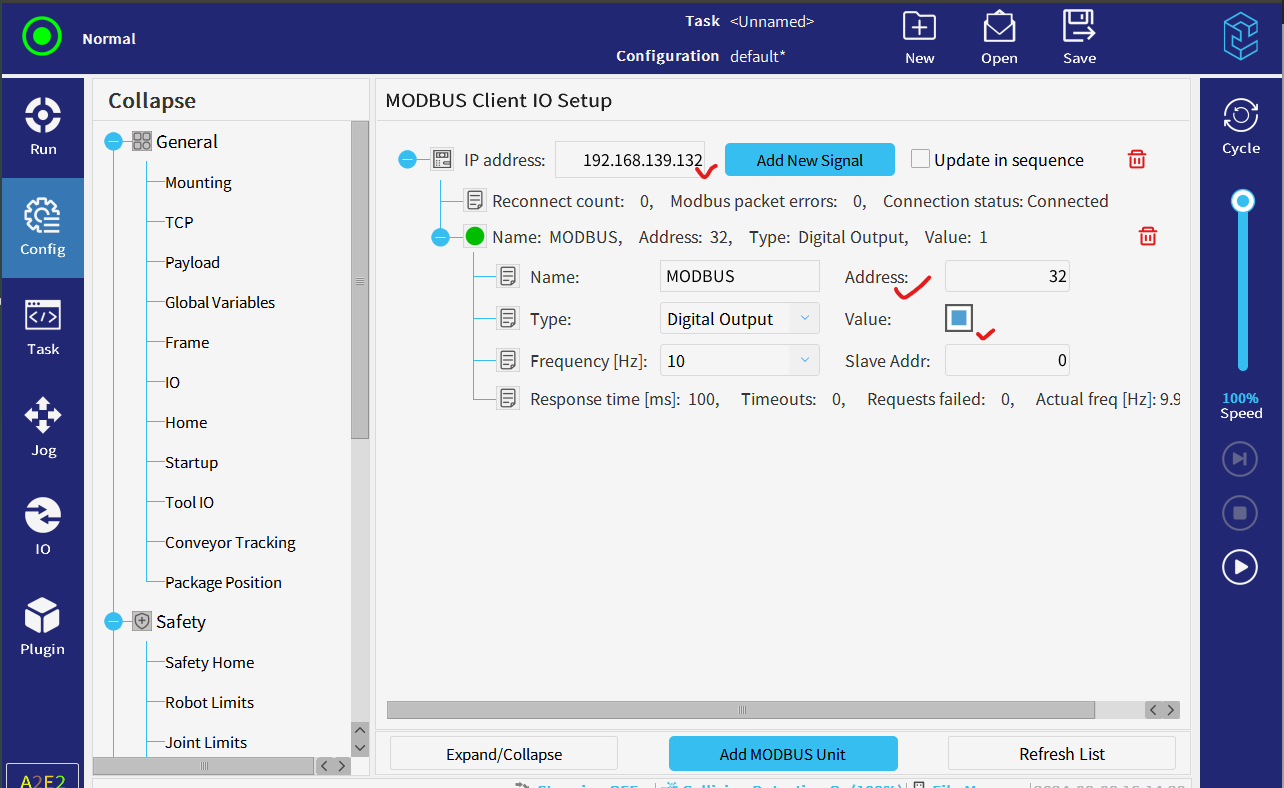
Read the value.