ELITE机器人关节没有采用主流工业机器人关节电机里面的电磁刹车片式抱闸,创新性地采用了电磁插销式抱闸。先介绍一下电磁插销式抱闸的工作原理。
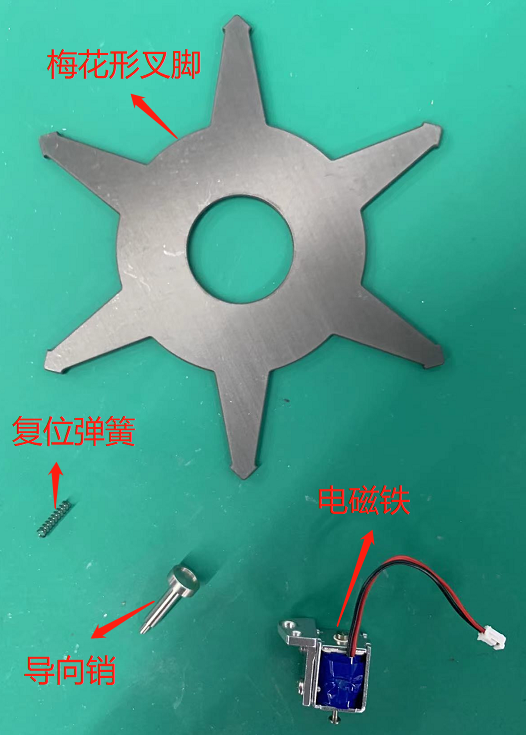
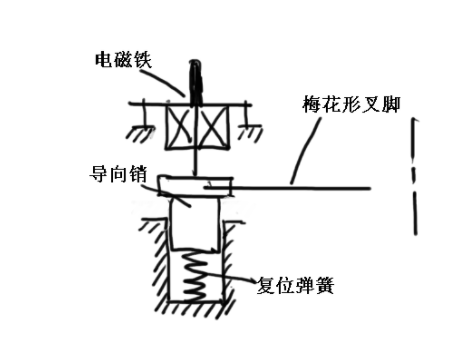
梅花形叉脚与电机轴相连。在电磁铁未通电的状态下,导向销在复位弹簧的作用下弹起,其肩部刚好可以挡住梅花形叉脚。这时抱闸处于闭合状态。在电磁铁通电或手动按下状态下,导向销下沉,其肩部低于梅花形叉脚。这时抱闸出于打开状态。
电磁插销式抱闸相比电磁刹车片式抱闸有下列优点:1.轴向尺寸更紧凑;2.电磁线圈发热量更小,散热效果也更好;3.成本更低。但是,电磁插销式抱闸也有一个缺点就是抱闸定位效果不好,机器人掉电之后关节有一个(60度/减速比)的活动范围;机械臂关机后,会有稍许的下坠。







