
PC or other device can read/write robot specified M coil and read robot status, joint position, Cartesian pose, joint speed, Cartesian speed, input/output through modbus
Elibot Modbus manual download link:
https://www.elibot.cn/upload/elibotEn/Download/20220210172418.pdf
click "Process"- "Modbus", Select Modbus/TCP or Modbus RTU and set parameter
Press "save" and restart robot controller
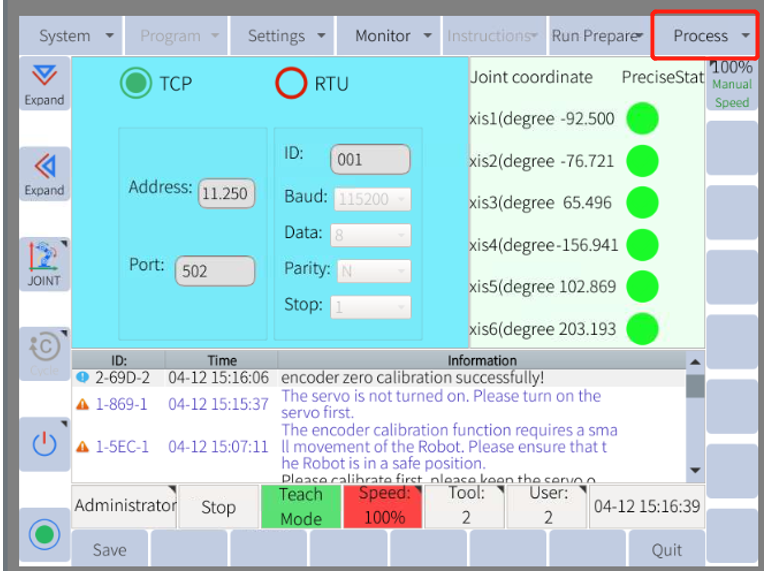
Elibot support Modbus/TCP and Modbus RTU
M0-M399: system input (read only)
M400-M527: system output (read only)
M528-M1471: for user(read / write)



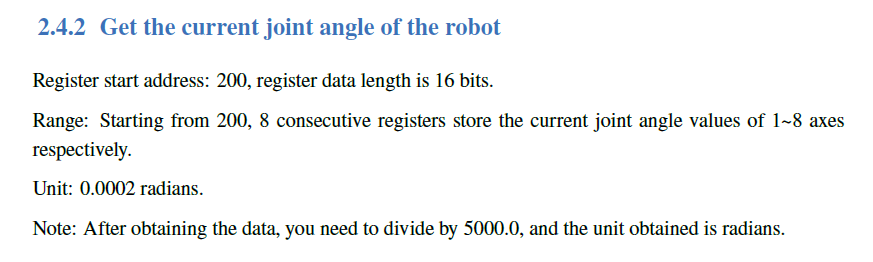
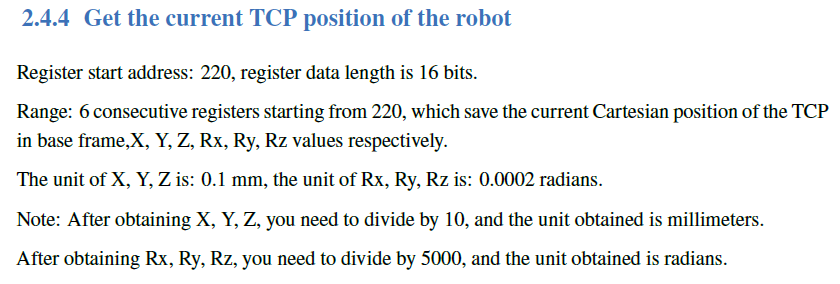
User can read robot joint position, speed and other information from register200.
User can refer to Elibot Modbus manual https://www.elibot.cn/upload/elibotEn/Download/20220210172418.pdf


ELIBOT RS485 : pin2 - GND,pin4- 485+,pin3 : 485-






