EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
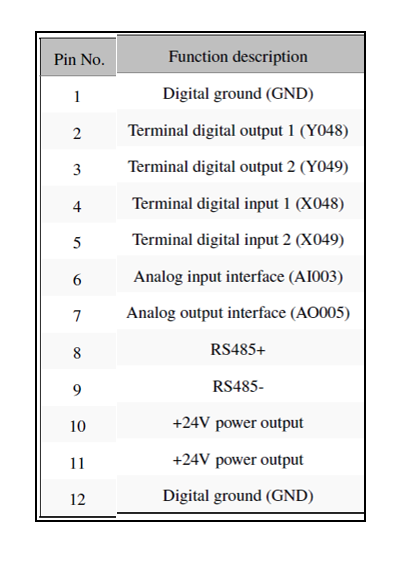
•There are 4 digital I/O and 2 analog I/O interfaces on the robot wrist (flange end).
•Communication with tools using RS485 protocol