艾利特机器人提供三种运行模式,分别为:
模式 | 描述 |
TEACH(示教) | 示教模式,在此模式下可以点动机器人、修改参数、创建或修改程序。 |
PLAY(自动) | 自动模式,执行程序时使用的模式 |
REMOTE(远程) | 远程模式,通过外部设备远程发送指令控制机器人。在此模式下,用户不可通过示教器进行报警清除、同步和速度调整。 |
当机器人处于PLAY模式时,用户可通过以下几种方式启动机器人程序:
其中通过示教器绿色启动键启动机器人属于通过内部按键方式启动,本资料不阐述。I/O信号和通讯指令方式启动机器人属于通过外部信号启动,将在后续章节详细描述。
本章节主要列举部分与外部启动相关的系统变量。
变量 | 描述 |
X4~X19 | 分别表示DI4~DI19的输入状态 取值范围:TRUE/FALSE |
变量 | 描述 |
Y0~Y19 | 分别表示DO0~DO19的输入状态 取值范围:TRUE/FALSE |
变量 | 描述 | 变量 | 描述 |
M0 | 显示机器人是否在急停状态 0:处于急停状态 1:正常 | M1 | 显示机器人是否在外部急停状态 0:处于外部急停状态 1:正常 |
M400 | 伺服是否处于使能状态 0:未使能 1:使能 | M401 | 机器人是否在程序原点 0:不在原点 1:在原点 |
M416 | 机器人是否处于TEACH(手动)模式 0:不在TEACH模式 1:处于TEACH模式 | M417 | 机器人是否处于PLAY(自动)模式 0:不在PLAY模式 1:处于PLAY模式 |
M418 | 机器人是否处于REMOTE(远程)模式 0:不在REMOTE模式 1:处于REMOTE模式 | M419 | 0:示教器运行键未按下 1:示教器运行键被按下 |
M420 | 0:示教器暂停键未按下 1:示教器暂停键被按下 | M421 | 0:示教器伺服键未按下 1:示教器伺服键被按下 |
M424 | 0:其他状态 1:机器人停止中 | M425 | 0:其他状态 1:机器人暂停中 |
M427 | 0:其他状态 1:机器人运行中 | M428 | 0:其他状态 1:机器人报警中 |
M464 | 光标是否在主程序首行 0:未在主程序首行 1:在主程序首行 | M465 | 是否处于同步状态 0:未同步 1:同步 |
M466 | 是否发生碰撞报警 0:未发生碰撞报警 1:发生碰撞报警 |
变量 | 描述 |
S0 | 外部急停 |
S1 | 启动 |
S2 | 暂停 |
S3 | 伺服ON |
S4 | 清除报警 |
S6 | 跳转至主程序首行(仅机器人在停止状态下有效) |
S17/S18 | 和缩减模式已启用 |
S19 | 保护停止后恢复运行 |
注意:该类型虚拟变量尽在用户PLC中使用。用户PLC可通过这些特定的变量控制机器人的程序运行。
本章节将举例说明如何使用I/O信号启动机器人程序。适用于通过外部开关、PLC I/O信号等硬接线方式启动机器人程序的场景。
例如有如下需求:外部有三个开关,分别要求实现对机器人清除报警并同步且同步后自动伺服上使能、启动程序、暂停程序的功能。需要通过外部启动的程序名称为mainfy.jbi。
1、将三个开关分别接线至输入4~输入6,即DI4~DI6。(此处仅为样例,实际可根据需求接至其他输入点。假设输入4为清报警并同步且同步后自动伺服上使能,输入5为启动主程序,输入6为暂停程序。)
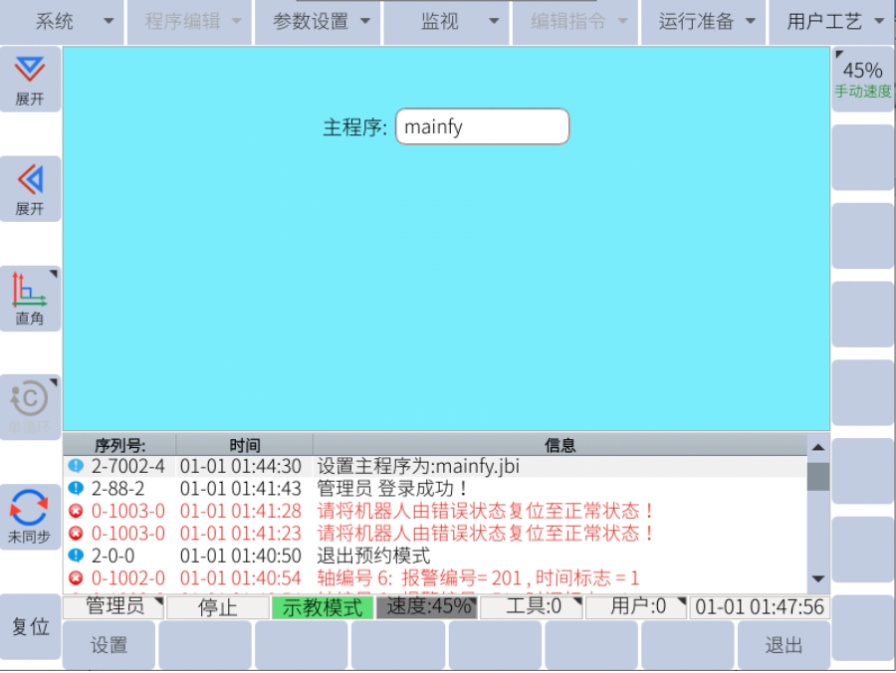
2、将mainfy.jbi设置为主程序。设置路径运行准备->主程序,如下图所示:

3、选择mainfy后点击屏幕左下角的设置按钮,设置完成后信息框提示“设置主程序为:mainfy.jbi”。
4、在用户工艺->用户PLC中编辑如下PLC样例程序,如下图所示:
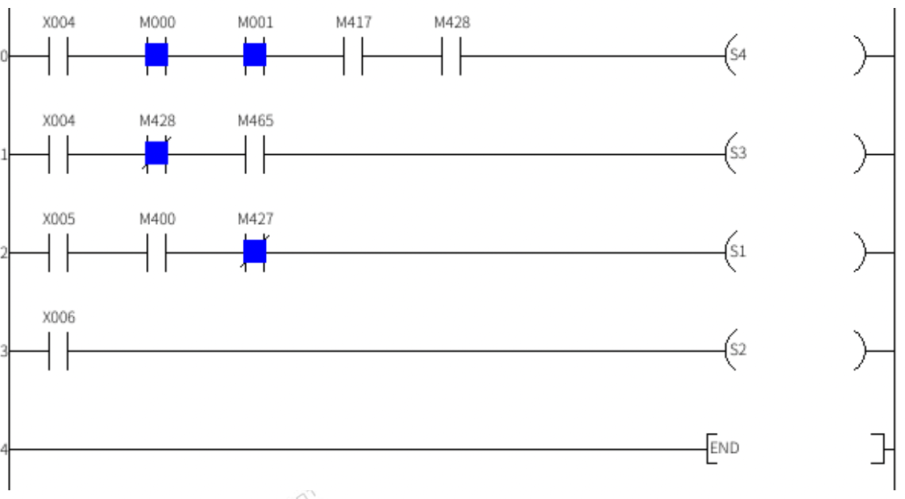
PLC程序解释如下:
注意:该PLC程序仅为样例,使用时需根据实际情况编写相应的用户PLC程序。
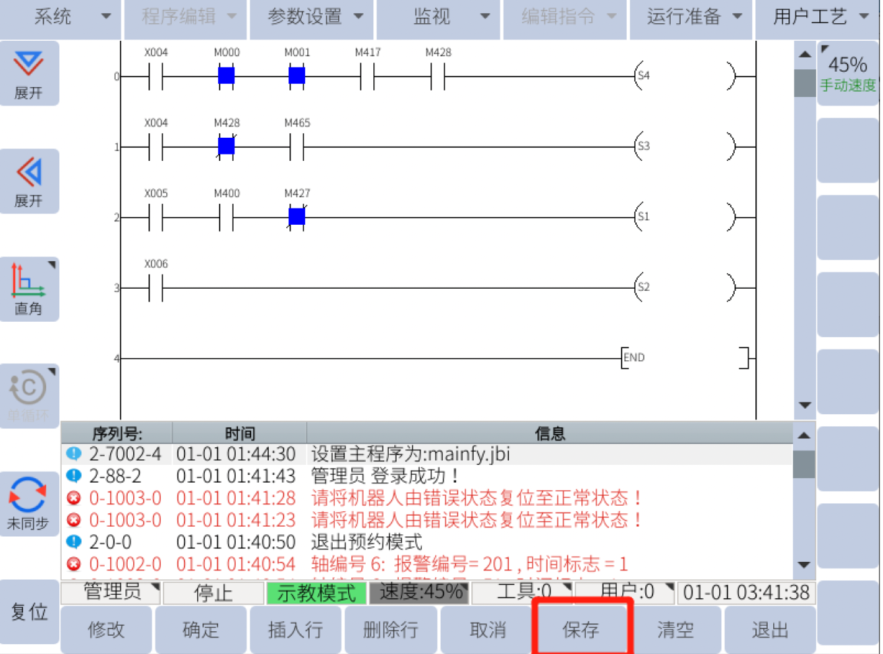
5、编辑完成后点击下方保存按钮。
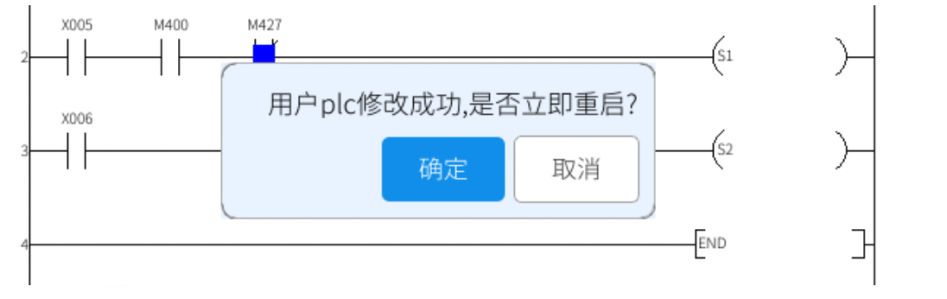
6、提示需要重启机器人,点击确定,机器人将自动重启。
7、重启过程中或重启完成后,可以将模式转换开关(钥匙开关)转至PLAY模式。
8、示教器界面将自动跳转至主程序界面。
9、此时,开机报警信息并未清除。按下输入4的按钮,清除报警信息并同步,且示教器左上角的SERVO状态灯亮起。
10、按下输入5的按钮,主程序开始运行。
11、按下输入6的按钮,可暂停主程序,若需再继续运行,可再次按下输入5的按钮。
艾利特机器人支持以下通讯方式:
通讯的使用方式请参照通讯相关手册。
在使用通讯方式启动机器人主程序时,并未涉及到实体按钮开关,因此不存在I/O接线事项,也不存在前述章节用户PLC所使用的X004、X005、X006等变量。例如使用M600替代X004、M601替代X005、M602替代X006。
上位机通过通讯的方式更改M600~M602的状态值即可。







