本文档基于V3.2.2
反向驱动模式主要是用于上电之后先手动移动机械臂至安全位置,例如开机超出软极限、不能自行松闸做编码器标定,或者是某些关节无法移动的场景。
用户可点击 ![]() ,再点击
,再点击  ,在弹出页面
,在弹出页面 点击“确定”,此时信息栏提示:机器人状态已经被重置,再点击
点击“确定”,此时信息栏提示:机器人状态已经被重置,再点击
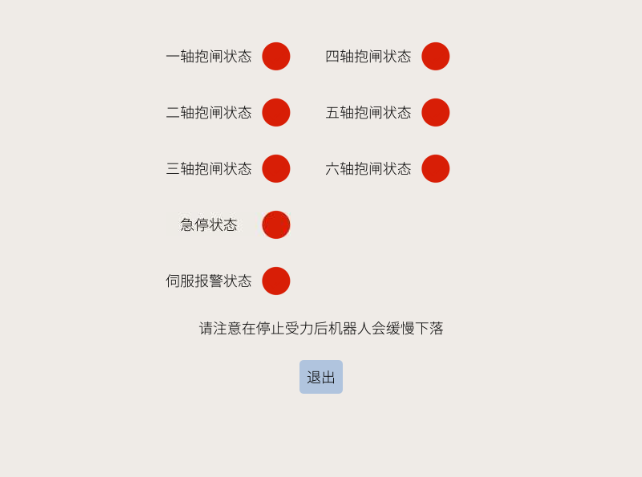
,在弹出页面 点击“确定”,此时进入反向驱动状态。手动可以掰动机器人至安全区域后,点击“退出”。
点击“确定”,此时进入反向驱动状态。手动可以掰动机器人至安全区域后,点击“退出”。
注意:反向驱动模式只可在机器人初始化状态下进入。


用户可以通过 S23 和 S24 两个 PLC 寄存器进入反向驱动模式,首先通过 S23 寄存器初始化后,再通过 S24 寄存器进入反向驱动模式。
程序示例:
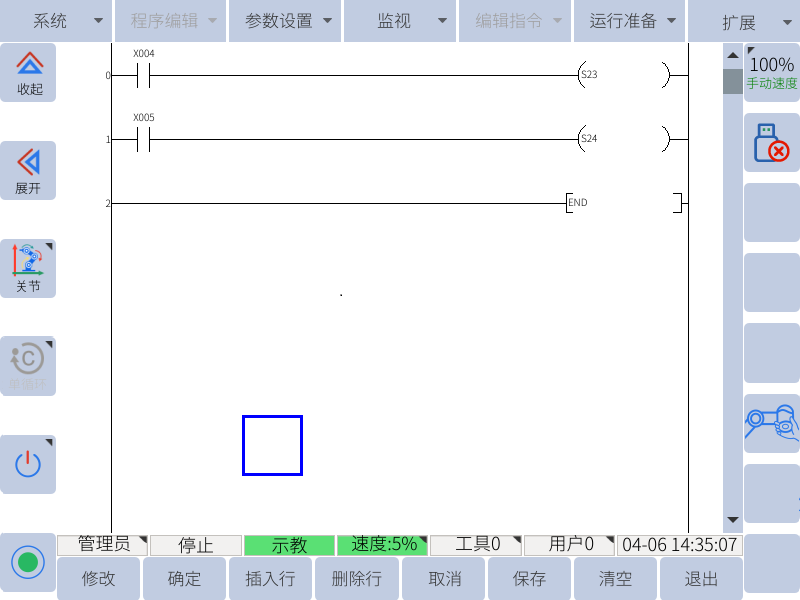
在本例中,X004 为连接到外部按钮的数字输入,用户按下按钮,机器人变为初始化状态。X005为连接到外部按钮的数字输入,用户按下按钮,机器人进入反向驱动模式。当松开按钮,机器人退出反向驱动。
注意:反向驱动模式只可在机器人初始化状态下进入。
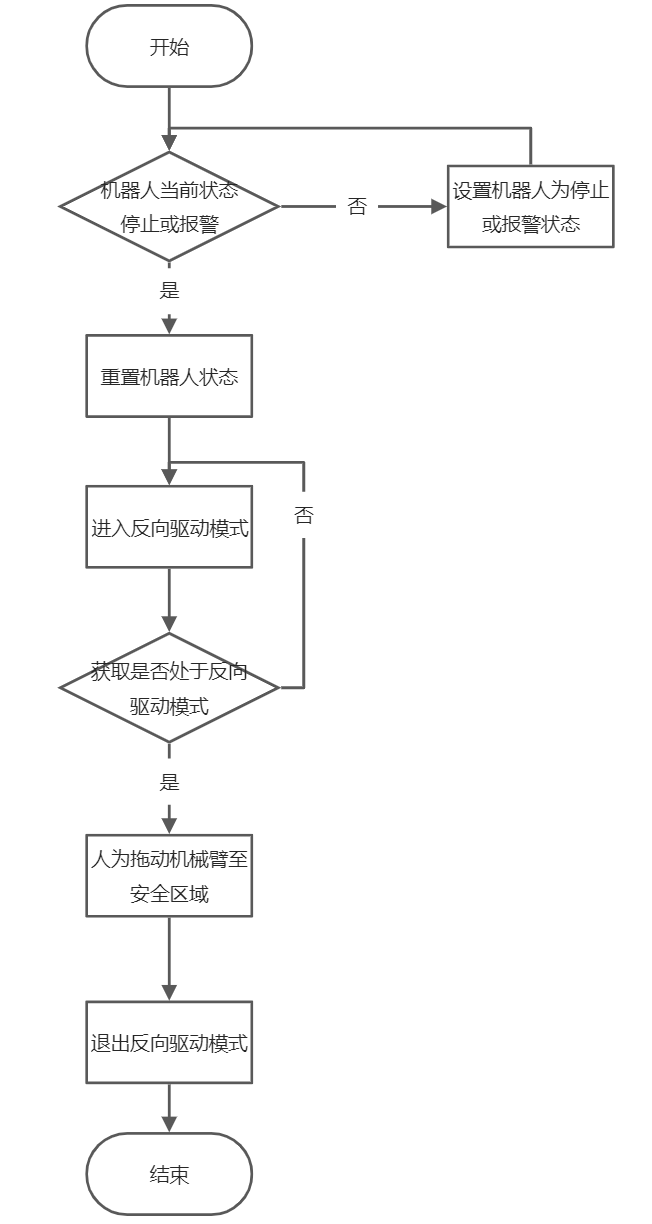
1.重置控制器状态
{"jsonrpc":"2.0","method":"reset_robot_status","id":id}
注意: 机器人必须处于停止 (不包括紧急停止) 或出错状态。本命令只支持在 remote 模式下使用。
2.进入反向驱动模式
{"jsonrpc":"2.0","method":"enter_backdrive","id":id}
注意:本命令只支持在 remote 模式下使用,并且机器人必须处于重置状态。
3. 获取是否处于反向驱动模式
{"jsonrpc":"2.0","method":"get_backdrive_status","id":id}
4. 获取伺服抱闸打开情况
{"jsonrpc":"2.0","method":"get_servo_brake_off_status","id":id}
注意: 本命令只支持在反向驱动模式下使用。
5.退出反向驱动模式
{"jsonrpc":"2.0","method":"exit_backdrive","id":id}
注意: 本命令只支持在 remote 模式下使用,并且机器人必须处于反向驱动模式。
流程: