用户可以通过M440-M455变量判断当前机器人是否进入对应干涉区。
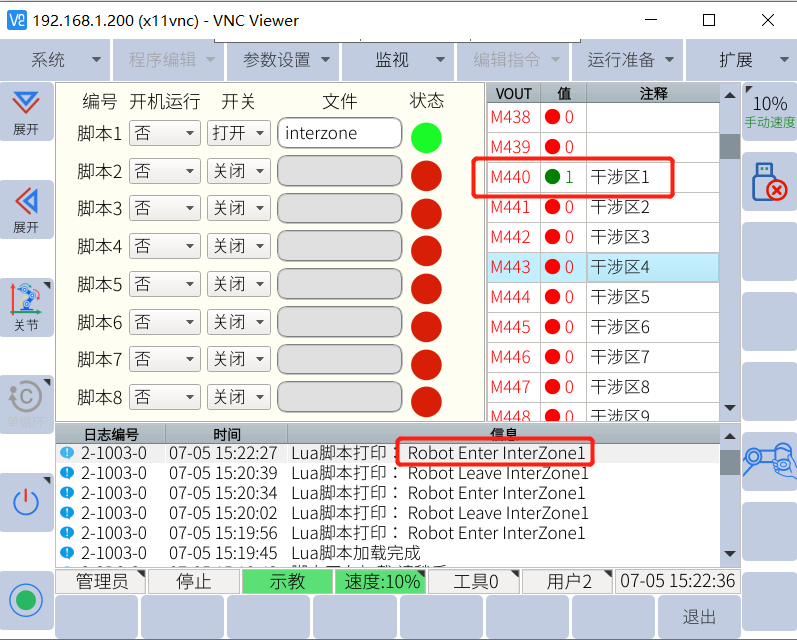
客户希望能在机器人进入/离开对应干涉区时在信息栏给出提示,如上图所示。
客户可以加载以下lua代码并运行即可。
-- author:chenliao@elibot.cn
-- 20220705
local recv, ret, recv2
local m = {}
local m_pre = {}
function Init()
recv ,ret=get_robot_register (55)
recv2 ,ret=get_robot_register (56)
for i = 1, 8, 1 do
if (recv & (2 ^ (i - 1)) > 0) then
m[i] = 1
else
m[i] = 0
end
end
for i = 1, 8, 1 do
if (recv2 & (2 ^ (i - 1)) > 0) then
m[i + 8] = 1
else
m[i + 8] = 0
end
end
for i=1,16,1 do
m_pre[i] = m[i]
end
end
Init()
while true do
recv ,ret=get_robot_register (55)
recv2 ,ret=get_robot_register (56)
for i = 1, 8, 1 do
if (recv & (2 ^ (i - 1)) > 0) then
m[i] = 1
else
m[i] = 0
end
end
for i = 1, 8, 1 do
if (recv2 & (2 ^ (i - 1)) > 0) then
m[i + 8] = 1
else
m[i + 8] = 0
end
end
for i=1,16,1 do
if(m[i]==1) and (m_pre[i]==0) then
elite_print('Robot Enter InterZone'..i)
elseif(m[i]==0) and (m_pre[i]==1) then
elite_print('Robot Leave InterZone'..i)
end
end
for i=1,16,1 do
m_pre[i] = m[i]
end
sleep(0.5)
end






