
艾利特机器人支持使用RoboDK进行仿真,通过驱动ElibotDriver可以让RoboDK模型和机器人真机同步位姿,拖动模型可使机器人自动运行到相应位置。
具体操作如下:
1. 将ElibotDriver.py放置到RoboDK的安装路径,默认路径:C:\RoboDK\api\Robot
2. 打开RoboDK,点击菜单栏“文件”-“打开”导入与真机对应的机器人模型
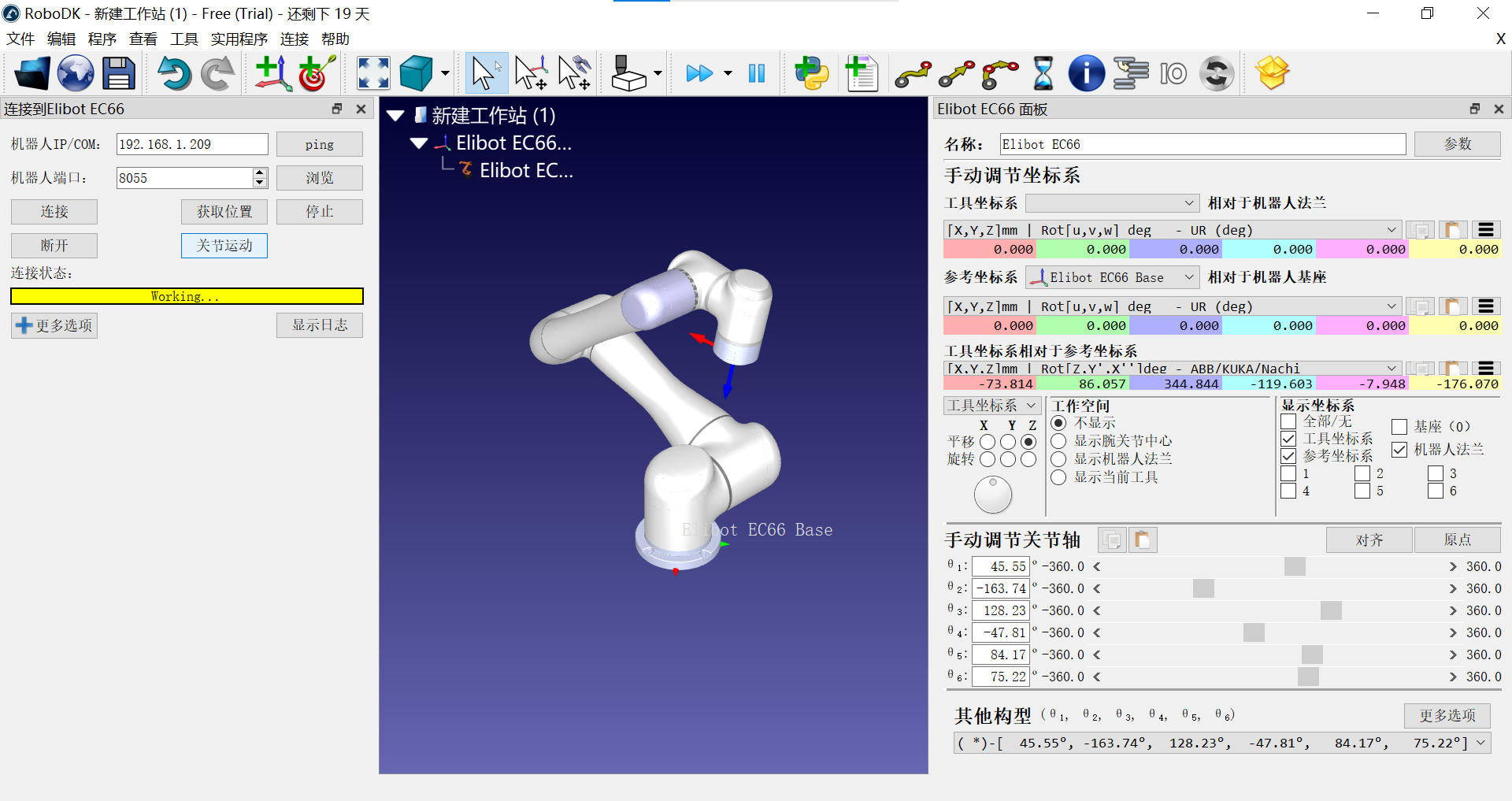
3. 点击菜单栏 “连接”-“连接机器人”,输入机器人IP和机器人端口(注:端口号为8055),再点击“连接”,如图

4. 连接成功后,连接状态显示为“Ready”,机器人模型自动同步当前实际机器人位姿。点击“获取位置”亦可更新位姿
5. 此时拖动机器人模型,并点击“关节运动”或者“直线运动”(个别版本只支持关节运动),机器人真机将自动运行到对应位置(注:机器人需要处于Remote模式并且已经上电)
6. 如需获得对应的驱动,请联系Elite官方技术支持邮箱:tech@elibot.cn
或通过阿里云链接下载:机器人版本V3.0以上「ElibotDriver.py」https://www.aliyundrive.com/s/aF5BfT2yWsX 提取码: m70s
机器人版本V3.0以下「ElibotDriver.py」 https://www.aliyundrive.com/s/svam2QpvSvC 提取码: 9ih5





