EC社区
CS社区
EC Forum
CS Forum
日本語
发帖
EC社区
CS社区
EC Forum
CS Forum
日本語
资讯
我的主页
意见反馈
1.
【论坛】CS 仿真模式输入IO、寄存器控制功能
机器人需要升级到2.9测试版及以上:CS控制软件支持在PC端,通过仿真运行的方式编写工艺任务文件,并进行仿真。但由于仿真环境中,无法触发输入IO状态,所以一些等待输入IO信号的工艺流程,目前无法在仿真环境中运行,仍…
分享
手机扫码分享
复制链接
0
1209
2.
【论坛】RoboDK监控CS机器人实时运动
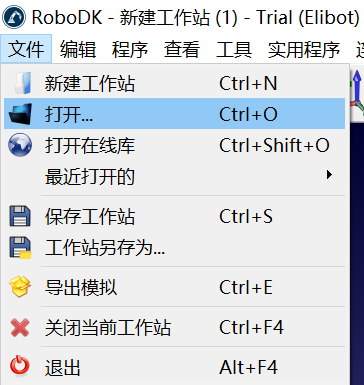
CS机器人现支持在RoboDK仿真中监控实时运动。操作只需以下几个步骤:1. 准备:PC需与机器人在同一网段下,使用FB1网口。2. 打开RoboDK,新建方案,点击左上角“打开”-导入与实际CS机器人型号一致的机器人模型-“打开”。导入…
分享
手机扫码分享
复制链接
0
1795
3.
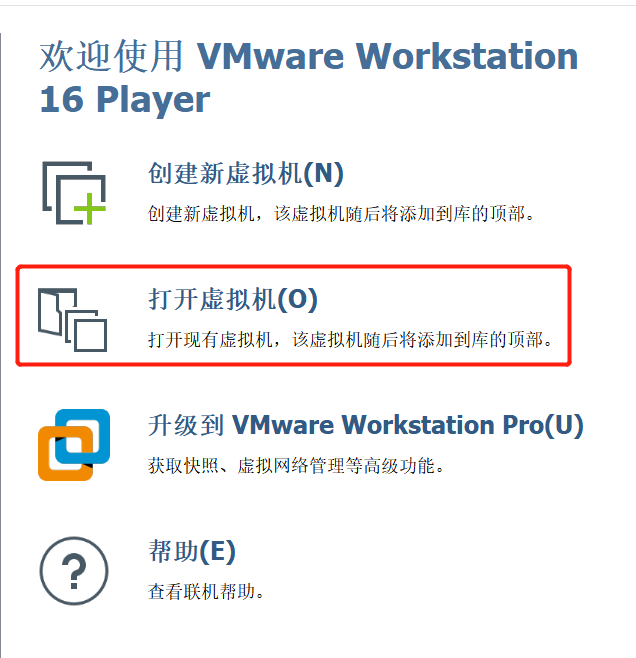
【论坛】如何安装并使用CS虚拟机
下载软件1.下载VMWare虚拟机软件并安装。链接:点击此处下载2. 下载所需版本的cs虚拟机文件并解压,存在电脑任意位置。链接:点击此处下载使用虚拟机1.打开下载好的VMWare软件,点击“打开虚拟机”。2.找到刚才解压后的文件夹,选择对应的虚拟文件并打开。3. 此时左侧会出现虚拟机图标,左侧选中该虚拟机,在右下角点击“播放虚拟机”。如遇密码:elibot。进入页面后,可选择所需的型号(CS Robot Simulator v2.6.0)双击打开并进行仿真。导出程序可在Home-elisim-elibo
分享
手机扫码分享
复制链接
1
5286
4.
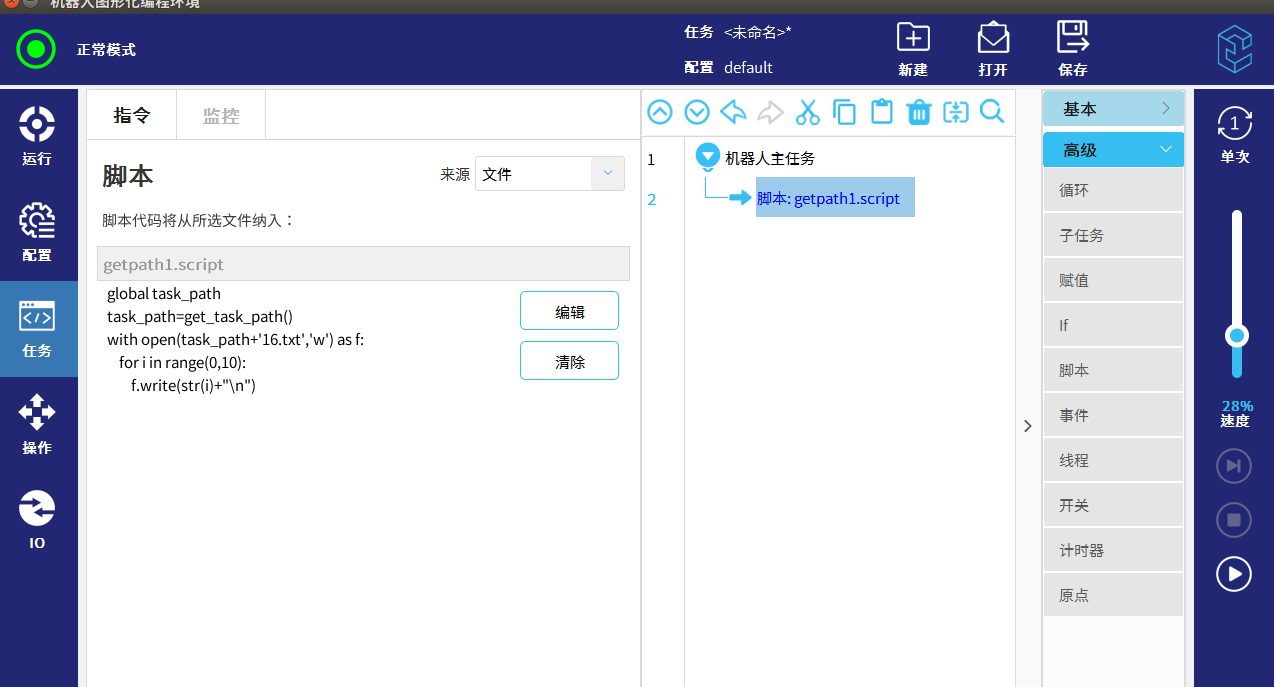
【论坛】CS机器人读写文件
此方法适用于软件版本2.5及以上!!例如要在机器人控制器的默认program文件夹下,新建并写入一个名字为"16.txt"的文件,可以先通过函数get_task_path获取当前机器人控制器的program文件夹的路径(对于仿真和真实控制器均有效,返回的路径不同)
分享
手机扫码分享
复制链接
0
1139
5.
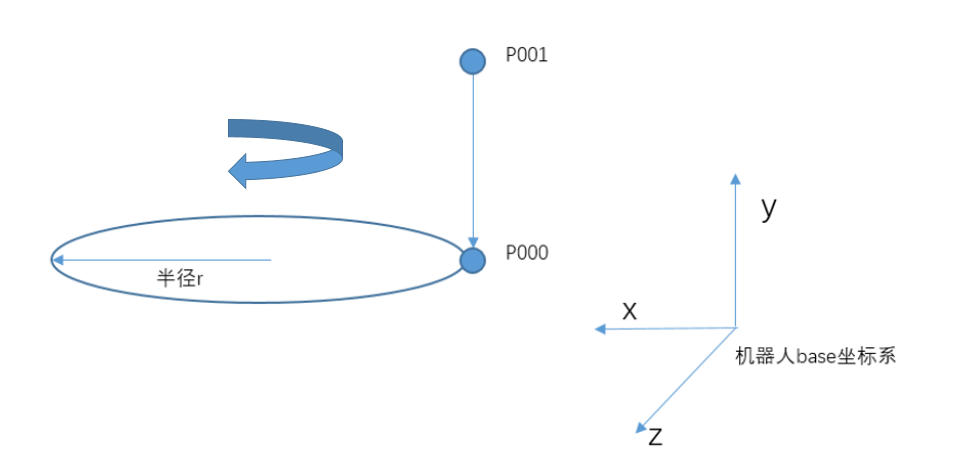
【论坛】JBI中微段轨迹MOVML的使用
可以通过离线仿真软件或者LUA等计算方式,获得等时间间隔的轨迹点(例如每10ms,最小可至1ms)。这些轨迹点位可以是Joint或者笛卡尔空间的。机器人基于以上离线轨迹,可以方便实现匀速运动(例如等时间等距离的轨迹)机器…
分享
手机扫码分享
复制链接
0
1468
6.
【论坛】使用RoboDK控制CS真机运动
艾利特CS机器人支持使用RoboDK进行仿真,通过驱动ElibotDriver可以让RoboDK模型和cs真机同步位姿,拖动模型可使机器人自动运行到相应位置。具体操作如下:注:此.py文件针对CS机器人,使用时请先保存之前的针对EC机器人的同名.py…
分享
手机扫码分享
复制链接
0
2054
7.
【论坛】使用RoboDK控制艾利特EC机器人真机移动
艾利特机器人支持使用RoboDK进行仿真,通过驱动ElibotDriver可以让RoboDK模型和机器人真机同步位姿,拖动模型可使机器人自动运行到相应位置。具体操作如下:1. 将ElibotDriver.py放置到RoboDK的安装路径,默认路径:C:\RoboDK\api\Robot2. …
分享
手机扫码分享
复制链接
14
4289
8.
【论坛】使用RoboDK生成离线的轨迹执行文件
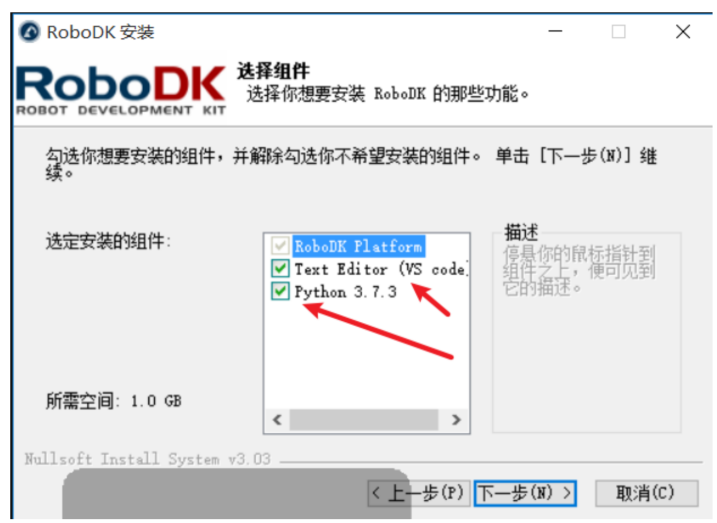
RoboDK是一款应用于工业机器人仿真与离线编程的软件,艾利特EC系列机器人已经支持RoboDK的仿真和离线编程。以下文章将展示如何使用Robodk生成离线的轨迹执行文件。1. 简易安装和使用1.1安装1.2导入模型1.3创建程序2. 后处理2.1生…
分享
手机扫码分享
复制链接
0
2509
9.
【论坛】使用RoboDK 监控EC机器人的位置
RoboDK是一款应用于工业机器人仿真与离线编程的软件,艾利特EC系列机器人已经支持RoboDK的仿真和离线编程。以下文章将介绍如何使用Robodk实时监控真实机器人的位置。1. 驱动说明该驱动仅将机器人的实际关节信息反馈至robodk界…
分享
手机扫码分享
复制链接
0
2079
请登录/注册
这个人很懒,没有留下如何东西~
发帖数
消息
个人资料
登录
密码登录
验证码登录
还没有账号,
立即注册
登录
获取验证码
还没有账号,
立即注册
登录
注册
获取验证码
已有账号,
立即登录
注册
我同意
《用户登录/注册隐私协议》
选择发帖板块
EC社区
设备使用过程中遇到的问题或使用心得
CS社区
分享在使用艾利特CS系列机器人时的经验心得、教程、问题等
EC Forum
EC English
CS Forum
CS English
日本語
日本語
上传文件