
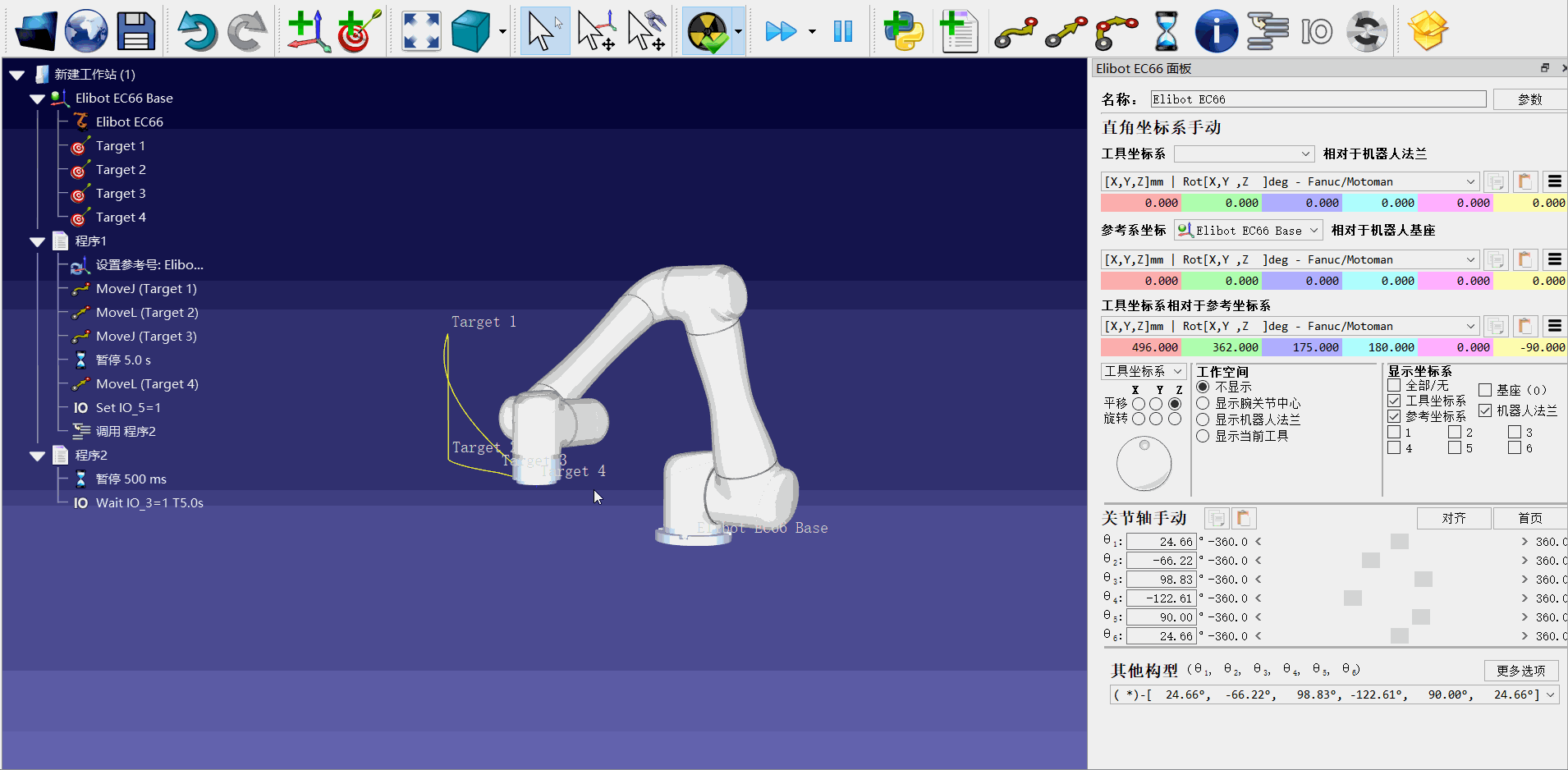
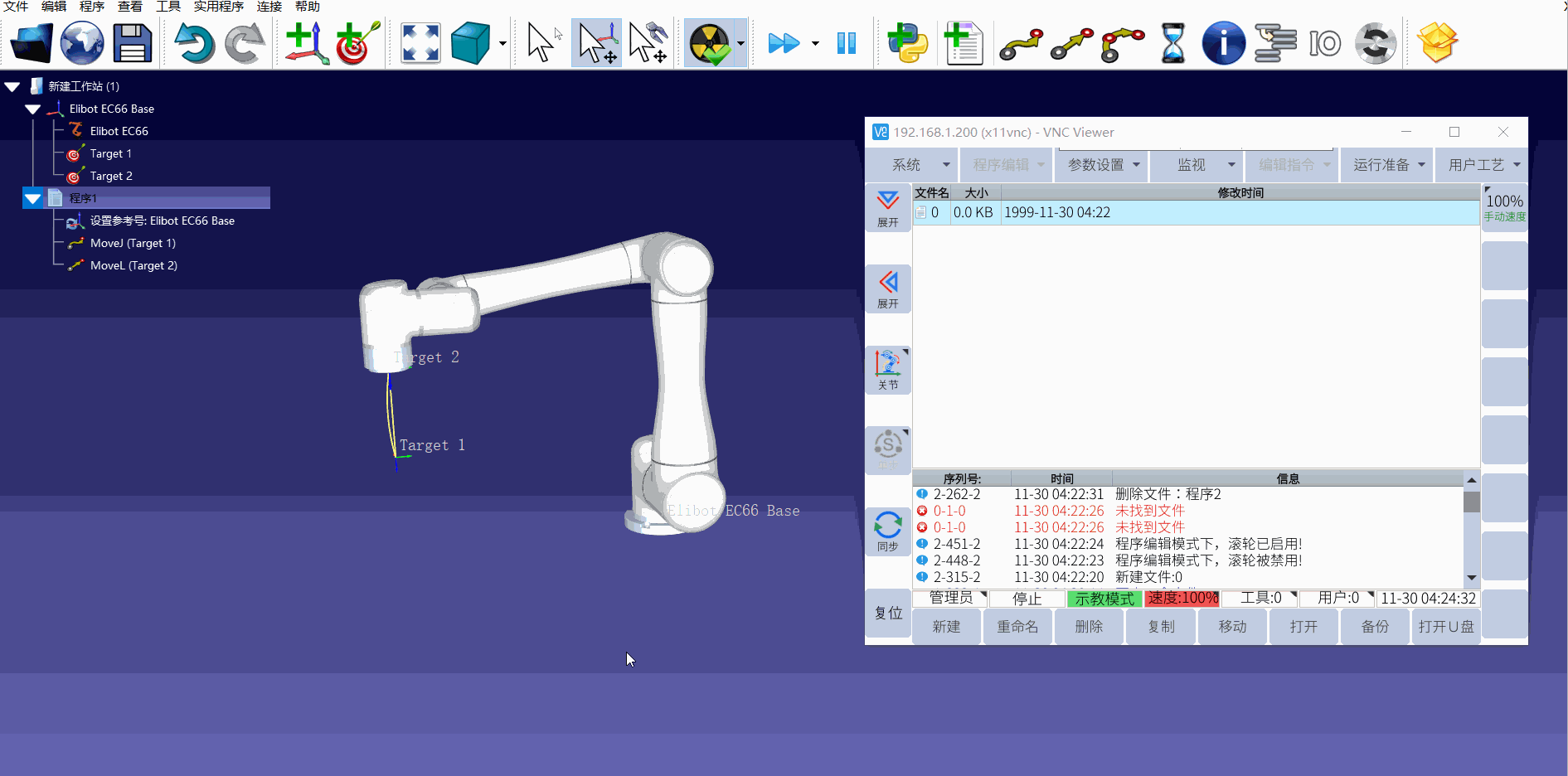
RoboDK是一款应用于工业机器人仿真与离线编程的软件,艾利特EC系列机器人已经支持RoboDK的仿真和离线编程。以下文章将展示如何使用Robodk生成离线的轨迹执行文件。


生成并发送到机器人需要额外安装python库,pip install pysftp,如果未安装则会弹出对话框报错
# 控制两个点关节之间的差 TOLERANCE_JOINTS_REFRESH = 0.1 # 刷新速率 REFRESH_RATE = 0.001 # The following constants are used to display the trajectory of motion PROGRAM_NAME = None # 无需秀修改 CREATE_MOVJ = True # 创建程序并不断添加movj指令 HIDE_TARGET = True # 隐藏程序目标点 HIDE_PROGRAM = True # 隐藏程序指令 # Create targets given a tolerance in degrees CREATE_TARGETS = True # 创建目标点 TOLERANCE_JOINTS_NEWTARGET = 10 # in degrees 创建目标点时判断的两个点之间的关节差
离线轨迹仿真程序可以仿真运行轨迹文件中的位置(该轨迹文件数据需要为关节)
# 仿真运行的离线轨迹文件路径(直接将地址复制过来可能会导致os error,请间接复制或手动输入) robodk_sim.robodk_sim(r"E:\1-Git\My_Project\02-robodk驱动\02-robodk驱动\path.jbi")

参数同监控程序
如需获取对应的驱动,请联系Elite官方技术支持邮箱:tech@elibot.cn
或通过百度云链接:链接: https://pan.baidu.com/s/1LLvf5eqAdAMGfTvhiQErpg 提取码: djdr






