
RoboDK是一款应用于工业机器人仿真与离线编程的软件,艾利特EC系列机器人已经支持RoboDK的仿真和离线编程。以下文章将介绍如何使用Robodk实时监控真实机器人的位置。
该驱动仅将机器人的实际关节信息反馈至robodk界面中,实现仿真界面中的机器人与实际机器人同步的效果。
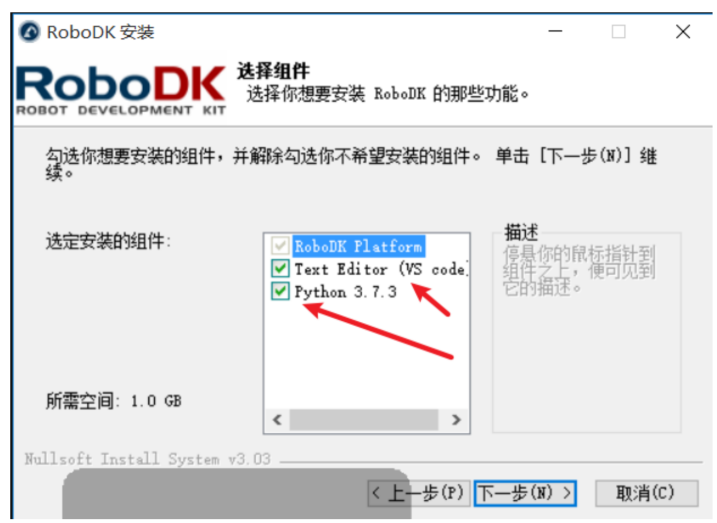
!!!请确保安装时勾选python环境
pip install robodk 进行安装)
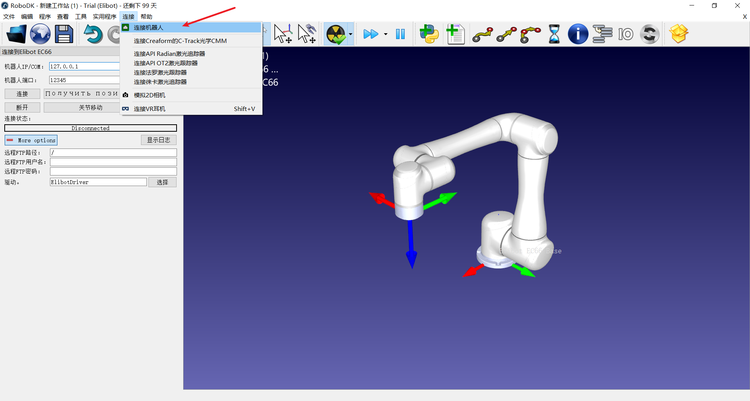
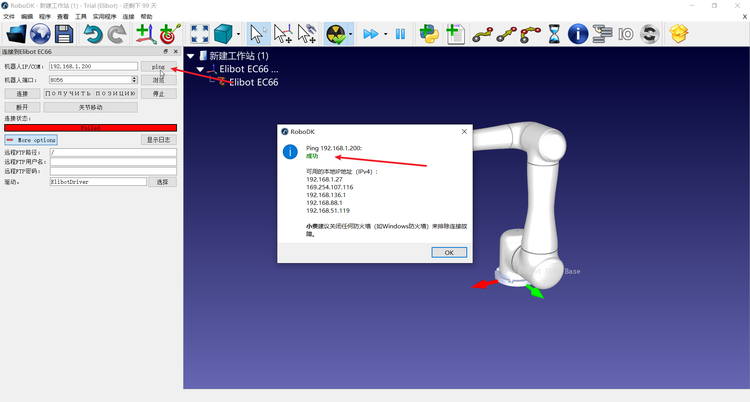

# Create targets given a tolerance in degrees CREATE_TARGETS = True #选择是否在ROBODK中创建目标点 TOLERANCE_JOINTS_NEWTARGET = 10 # in degrees 判断创建目标点的间隔 ROBOT_IP = None # 机器人ip,如果为None,则需要在连接机器人选项中更改对应的ip号
如需获取对应的驱动,请联系Elite官方技术支持邮箱:tech@elibot.cn
或通过百度云链接:链接: https://pan.baidu.com/s/1LLvf5eqAdAMGfTvhiQErpg 提取码: djdr






